
Инструкция по установке роботизированных рук SWITEK для литьевых машин – Глава 5: Эксплуатация
Abstract
Три режима работы роботизированных манипуляторов для литьевых машин: ручной, стоп и автоматический. Оператор может выбрать их с помощью переключателя в левом верхнем углу пульта управления. В этой главе мы обсудим, как управлять и программировать роботизированный манипулятор при его тестировании, программировании, настройке параметров и запуске в автоматическом режиме.
5.1 Возвращено исходное положение
Чтобы робот мог автоматически корректно работать после включения питания, необходимо возврат в исходное положение (ORI) заставить робота вернуться в исходное положение по каждой оси, а присоски и фиксаторы должны вернуться в закрытое положение.
В режиме остановки нажмите кнопку «Home» один раз, затем нажмите кнопку «Start», чтобы вернуться в исходное положение по каждой оси Y1(Y2), X1(X2), Z по порядку. При этом появится окно с напоминанием о том, что вы продолжаете операцию OPR, и все возвращаются в исходное положение, при этом положение каждой электрической оси равно 0.
Когда все оси, присоска и крепление возвращаются в исходное положение, в правом верхнем углу экрана появляется значок  , вы можете работать в автоматическом и ручном режиме.
, вы можете работать в автоматическом и ручном режиме.
Во время работы привода невозможно управлять вручную, автоматически и изменять настройки. В случае чрезвычайной ситуации нажмите кнопку остановки или кнопку аварийной остановки, чтобы остановить привод.
5.2 Ручное управление
Поверните ручку влево, и робот перейдет в ручной режим, как показано ниже:
5.2.1 Действие оси
Пользователи не могут перемещать рычаги до достижения ими исходного положения, но могут управлять пневматическими клапанами.
 | Пневматическое управление: Главный рычаг поднят при однократном нажатии Электрическое управление: Главный рычаг поднимается при нажатии. Движение прекращается при отпускании кнопки. |
 | Пневматическое управление:Основной рычаг опускается при однократном нажатии. Электрическое управление:Основной рычаг опускается при нажатии. Движение прекращается при отпускании кнопки. |
 | Пневматическое управление:Рукоятка тисков поднимается при однократном нажатии. Электрическое управление:Рукоятка тисков с нажатым рычагом. При отпускании рычага движение прекращается. |
 | Пневматическое управление:Рукав тисков опускается при однократном нажатии. Электрическое управление:Рукав тисков опускается при нажатии. При отпускании кнопки движение останавливается. |
 | Пневматическое управление:Основной рычаг назад при однократном нажатии. Электрическое управление:Основной рычаг отводится назад при нажатии. При отпускании кнопки движение прекращается. |
 | Пневматическое управление:Основной рычаг вперед при однократном нажатии. Электрическое управление:Главная стрела вперёд при нажатии. Движение прекращается при отпускании кнопки. |
 | Пневматическое управление:Отведение рычага назад при однократном нажатии. Электрическое управление:Рукав движется назад при нажатии. При отпускании кнопки движение прекращается. |
 | Пневматическое управление:Подъемный рычаг вперед при однократном нажатии. Электрическое управление:Вспомогательный рычаг вперёд при нажатии. Движение прекращается при отпускании кнопки. |
 | Пневматическое управление:Положение переключается в вертикальное при однократном нажатии. Электрическое управление:При нажатии происходит перемещение в вертикальное положение. При отпускании кнопки движение прекращается. |
 | Пневматическое управление:При однократном нажатии рука робота возвращается в горизонтальное положение. Электрическое управление:При нажатии манипулятор робота принимал горизонтальное положение. При отпускании кнопки движение прекращалось. |
 | Траверс В |
 | Траверс Аут |
5.2.2 Действие приспособления
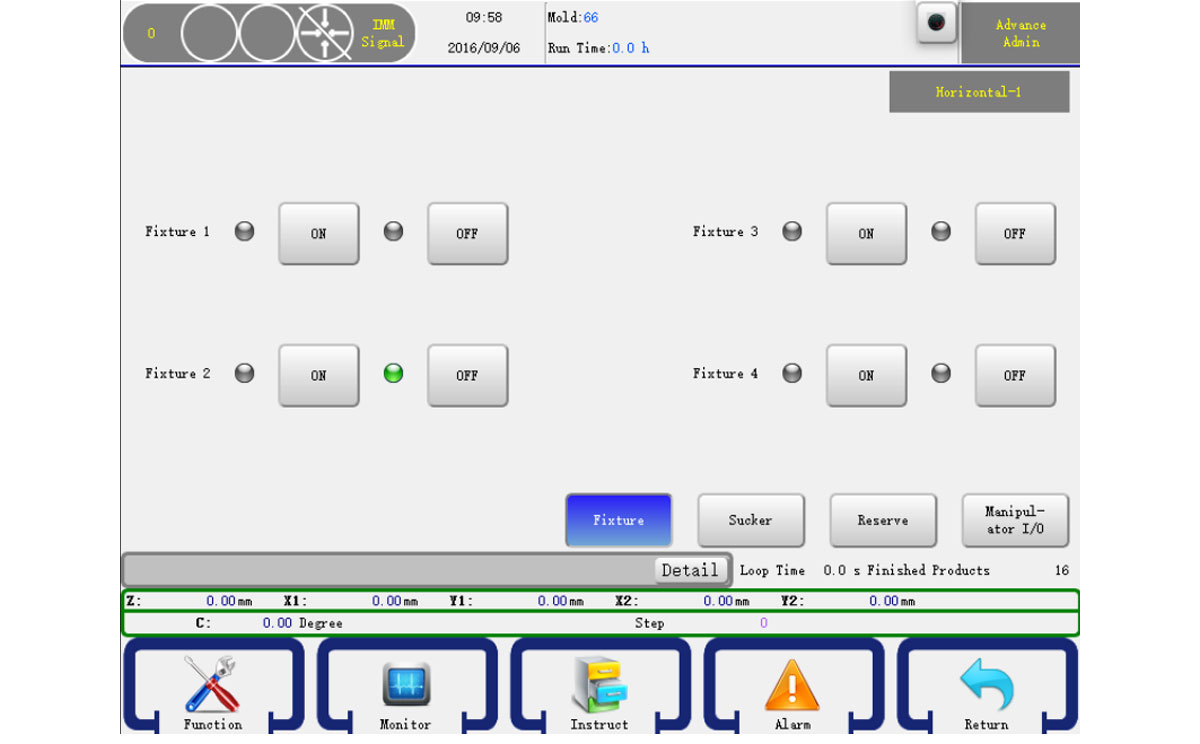
На странице руководства нажмите кнопку Приспособление в правом нижнем углу, чтобы перейти на страницу ручного приспособления, как показано ниже:
Имеется четыре устройства. Нажмите кнопку ВКЛ для включения и кнопку ВЫКЛ для выключения.
Внимание: Входной сигнал горит красным, а выходной — зелёным. Индикатор входа или выхода не горит, если сигнал отсутствует.
5.2.3 Действие присоски
На странице руководства нажмите кнопку [Sucker] в правом нижнем углу, чтобы перейти на страницу руководства, как показано ниже:
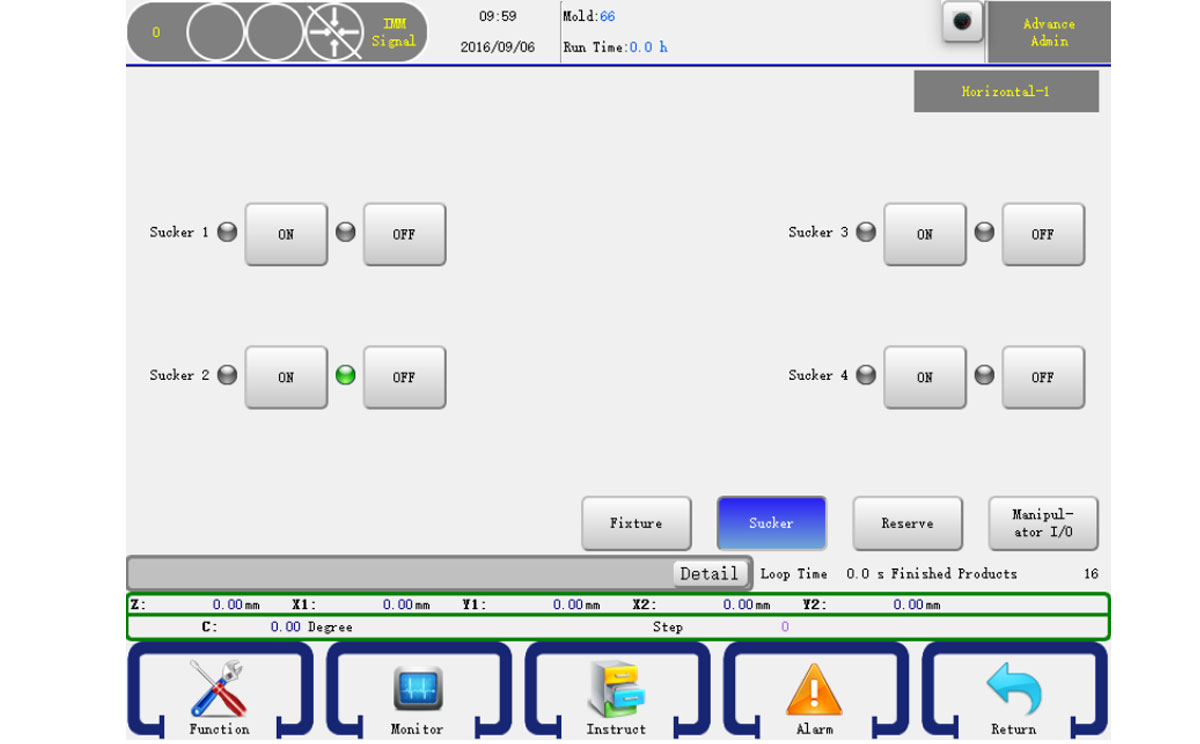
Четыре присоски. Нажмите кнопку ВКЛ, чтобы включить, и кнопку ВЫКЛ, чтобы выключить.
Внимание: Входной сигнал горит красным, а выходной — зелёным. Индикатор входа или выхода не горит, если сигнал отсутствует.
5.2.4 Вспомогательное действие
На странице руководства нажмите кнопку Другое в правом нижнем углу, чтобы перейти на другую страницу руководства, как показано ниже:
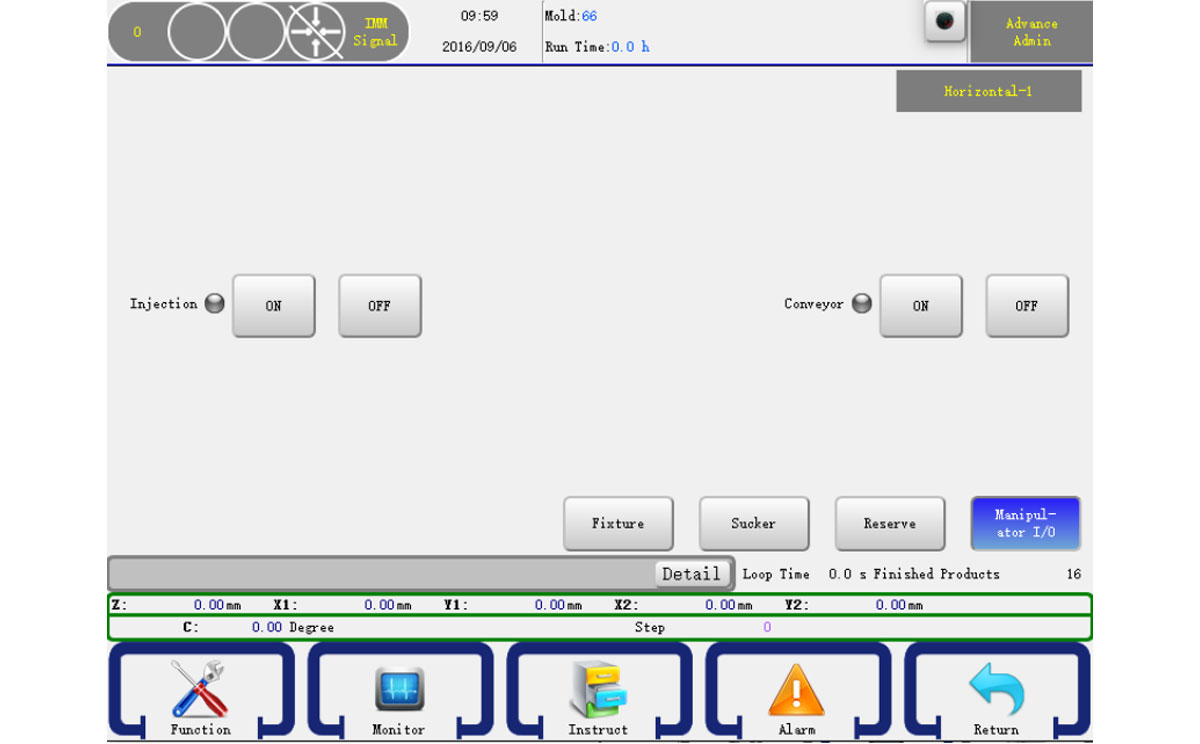
Операция та же, что и у Fixture
5.2.5 Резервное действие
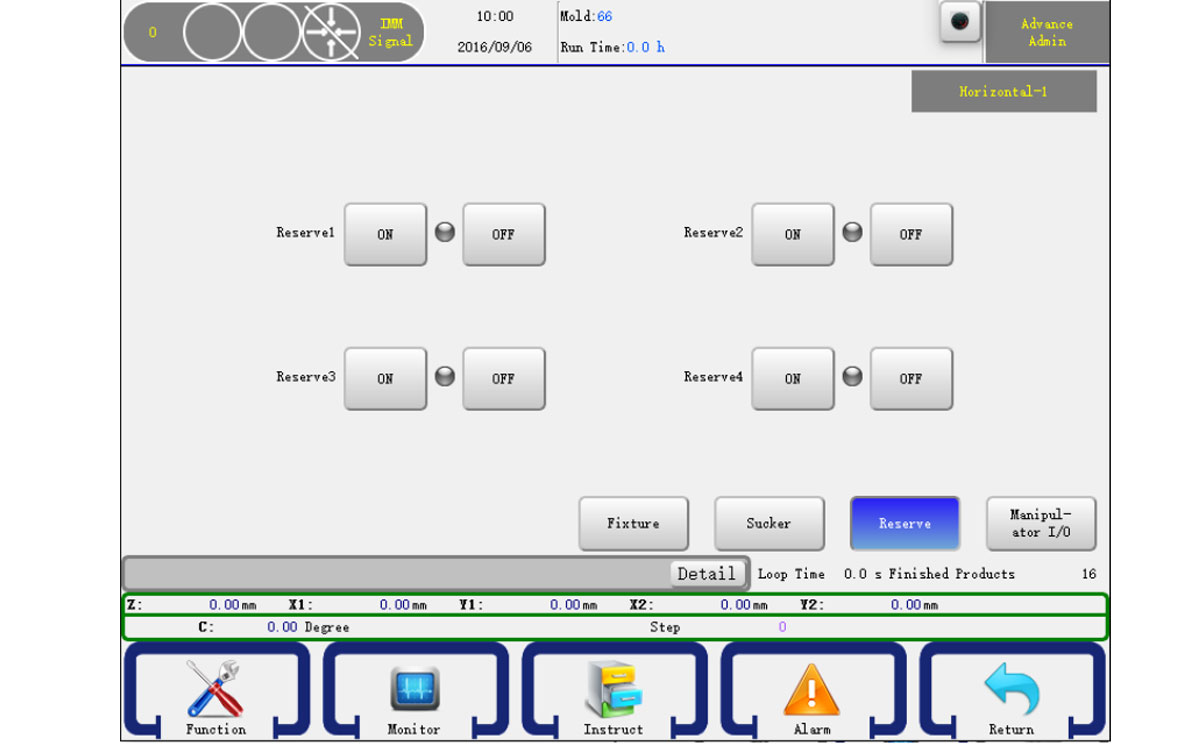
Операция та же, что и у Fixture
5.3 Автоматический режим
5.3.1 Мониторинг состояния автоматического запуска
Поверните ручку вправо, чтобы перейти на страницу автоматического запуска. Робот перейдёт в состояние готовности к автоматическому запуску. В этом состоянии нажмите кнопку запуска, чтобы робот перешёл в состояние автоматического запуска. Вы можете отслеживать состояние запуска, как показано ниже.
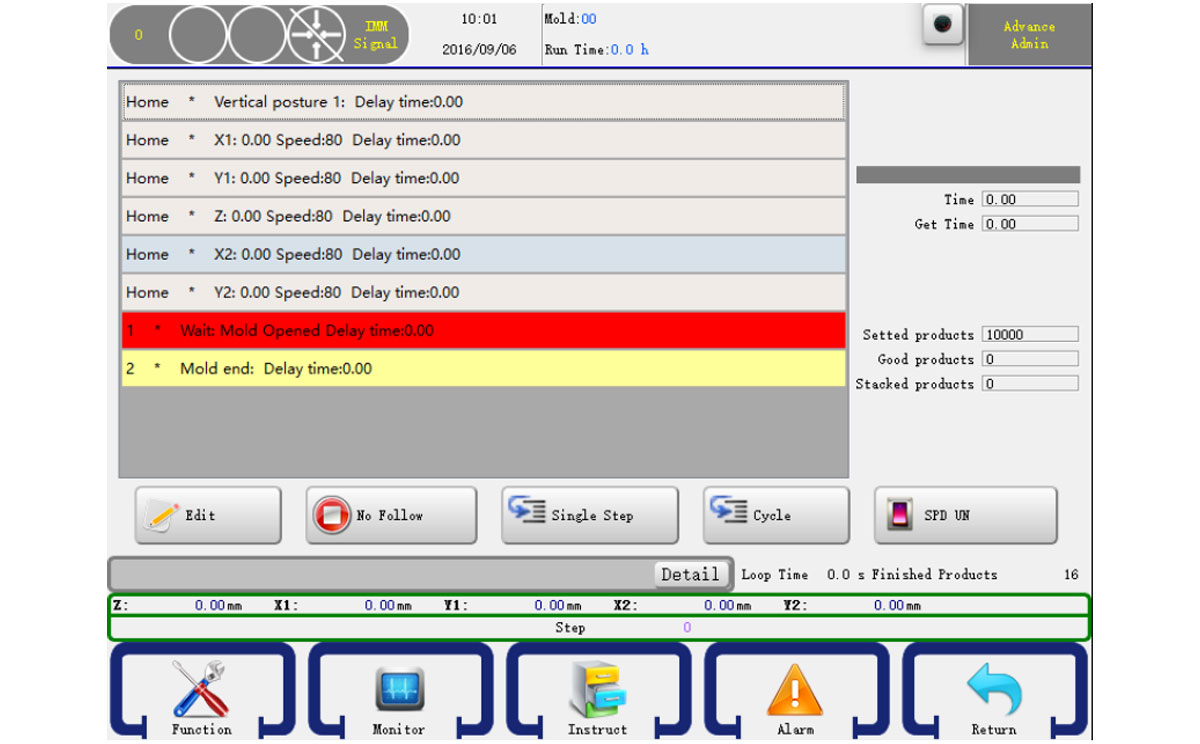
- Период: Время приостановки в цикле автоматического выполнения.
- Время извлечения: Время, которое робот тратит на то, чтобы достать и извлечь продукт в автомате.
- Установленные продукты: Количество продуктов в наборе. Сигнализация срабатывает при достижении счётчика продуктов.
- Квалифицировано: Количество деталей, извлеченных роботизированной рукой.
- Количество уложенных товаров: Количество товаров, уложенных роботом.
- Loop Time: The time after a carry out cycle in the Auto.
- Количество готовых изделий: Количество готовых изделий.
5.3.2 Настройка текущих конфигураций
В режиме автоматического выполнения вы можете изменить действия программы. Просто выберите шаг и нажмите кнопку «Изменить». Кнопка «Изменить» откроет диалоговое окно редактора. После нажатия кнопки «ОК» эти данные будут приняты и в следующем цикле будут выполнены в соответствии с вашими настройками. Если нажать кнопку «Отмена», операция будет отменена.
Чтобы гарантировать, что эти настройки не повредят робота, машину или пресс-форму, допускается диапазон в 5 мм. Как показано ниже:
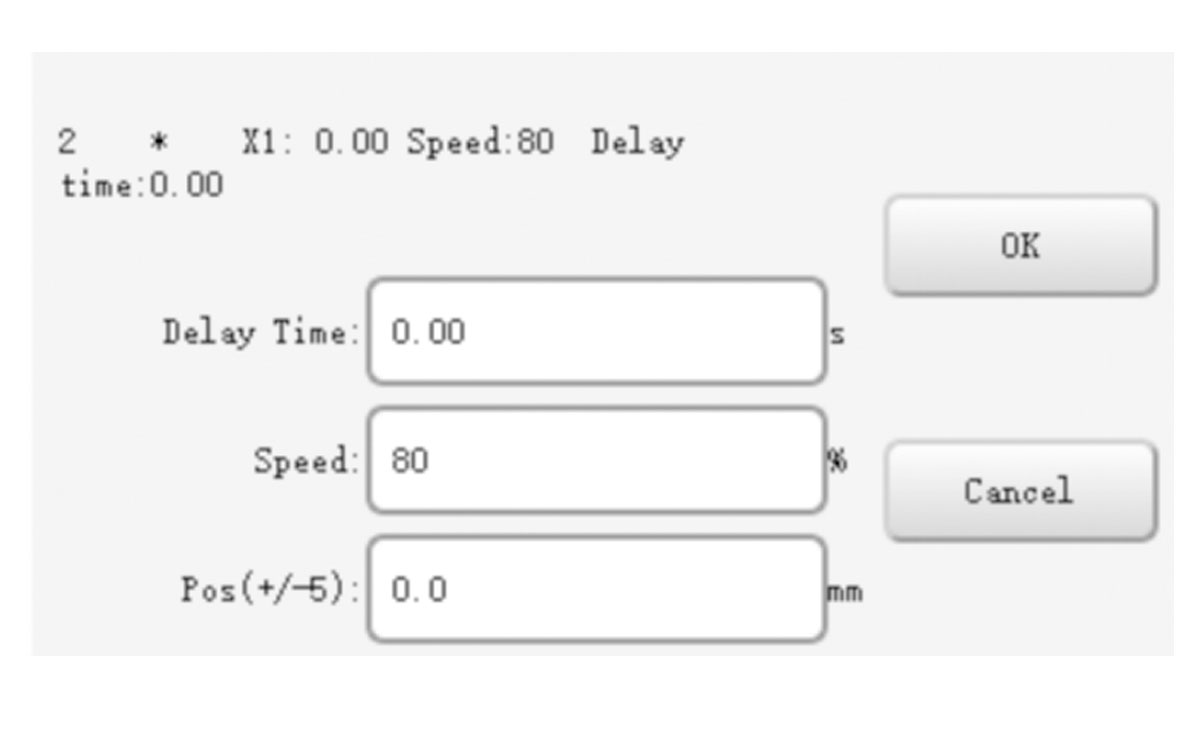
После завершения просто нажмите кнопку «ОК», чтобы подтвердить изменения.
5.3.3 Бег одним шагом
В режиме автоматического выполнения вы можете нажать одну кнопку, чтобы запустить шаг. Повторное нажатие запустит следующий шаг и т.д. Эта функция очень полезна при отладке программы.
5.3.4 Регулировка скорости
Нажмите кнопку «Кнопка скорости», чтобы она стала «Дисплеем скорости», и отрегулируйте общую скорость, нажав кнопку «Регулировка скорости» на клавиатуре и панели в левом нижнем углу.







