Инструкция по установке роботизированных рук SWITEK для литьевых машин – Глава 7: Конфигурация функций
Абстрактный
Программирование роботизированной руки для литьевой машины — это не только настройка положения осей, включение/выключение цилиндров и других компонентов EOAT и т. д., но и настройка сигналов для связи робота с литьевой машиной, параметры продукта, настройки стека, конфигурации машины, системные настройки, настройки точек безопасности и т. д. В этой главе мы пошагово обсудим, как настраиваются эти параметры роботизированной руки.
В состоянии «Остановка» нажмите на пункт меню «Функция» в главном меню, чтобы перейти на страницу настройки функций. Как показано ниже:
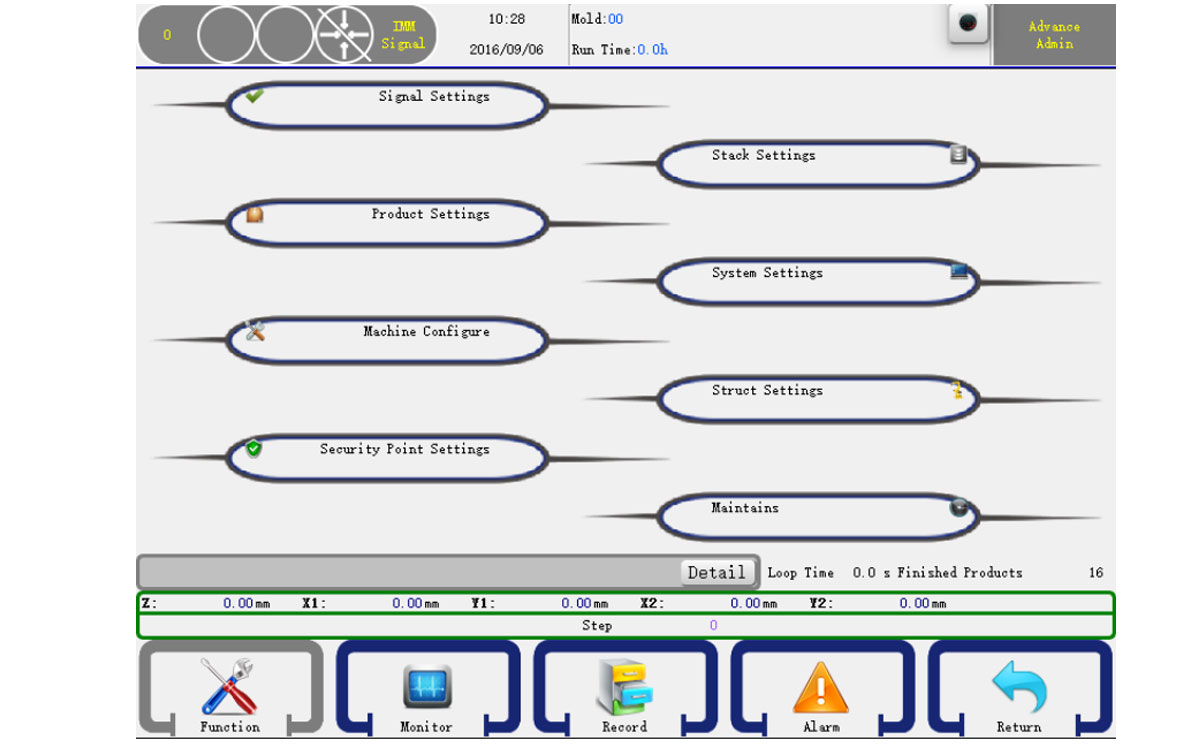
На этой странице можно выбрать группу функций. Щелкнув по элементу, вы откроете соответствующую страницу настроек. Настройки структуры могут быть заданы только Продвинутым администратором.
7.1 Настройки сигнала
Щелкните элемент «Настройки сигнала», чтобы перейти на страницу настроек сигнала, как показано ниже:

- Определение устройства 1–4:
Положительный результат: Проверьте, включен ли входной сигнал устройства.
Обратный результат: Проверьте, выключен ли входной сигнал устройства. - Вспомогательное устройство
Положительный результат: Проверьте, включен ли входной сигнал устройства.
Обратный результат: Проверьте, выключен ли входной сигнал устройства. - Определение положения:
Горизонтальное:Поза должна быть горизонтальной при выполнении действия перемещения.
Вертикальное:Поза должна быть вертикальной при выполнении действия перемещения.
Без ограничений:Без ограничений: Не определяет. - Определение исходного положения:
Горизонтальное:Рука робота должна находиться в горизонтальном положении при выполнении движения по горизонтали.
Вертикальное:Рука робота должна находиться в вертикальном положении при выполнении движения по вертикали.
Без ограничений:Без ограничений: Не обнаруживается. - Положение U/D:
Горизонтальное:Рука робота должна находиться в горизонтальном положении при выполнении движения по горизонтали.
Вертикальное:Рука робота должна находиться в вертикальном положении при выполнении движения по вертикали.
Без ограничений:Без ограничений: Не определяется. - Горизонтальный режим ожидания:
Форма с ограничением хода: Закрытие формы стало возможным только после того, как роботизированная рука перешла в положение ожидания.
Форма без ограничения хода: Закрытие формы стало возможным, как только роботизированная рука начала движение вверх. - Закрыть форму:
Использование:Робот войдет в форму для сбора деталей только после сигнала Форма открыта, поданного после сигнала Форма закрыта. В противном случае выдается сигнал Форма не заблокирована.
Не использовать:Робот не обнаружит сигнал Форма закрыта, но войдет в форму для сбора деталей сразу после получения сигнала Форма открыта. - Обнаружение защитной двери:
Применение: Сигнализация открыта защитной двери во время автоматического движения робота, независимо от выполняемого действия.
Не использовать: Сигнализация открыта защитной двери во время опускания манипулятора. - Определение давления:
Применение: Робот проверяет давление сжатого воздуха. Если оно ниже стандартного значения, подается сигнал тревоги.
Не использовать: Давление не проверяется. - Обнаружение середины формы:
Применение:Робот проверяет сигнал середины формы. Если при опускании манипулятора робота внутрь формы сигнал отсутствует, подается сигнал тревоги.
Не использовать: Не проверять сигнал середины формы. - Блокировка выталкивателя:
Использование:Сигнал включения выталкивателя будет отключен после завершения открытия формы, и сигнал «Включение выталкивателя» необходимо вставить в программу.
Не используется:Сигнал Включение выталкивателя обычно включен. - Автозапуск
Использование:Робот проверяет сигнал Авто от литьевой машины. Если сигнал не обнаружен в Авторежиме, подается сигнал тревоги. Не использовать:Робот не проверяет сигнал Авто от литьевой машины.
7.2 Настройки продукта
Нажмите кнопку Настройки продукта, чтобы перейти на страницу настроек продукта, как показано ниже:
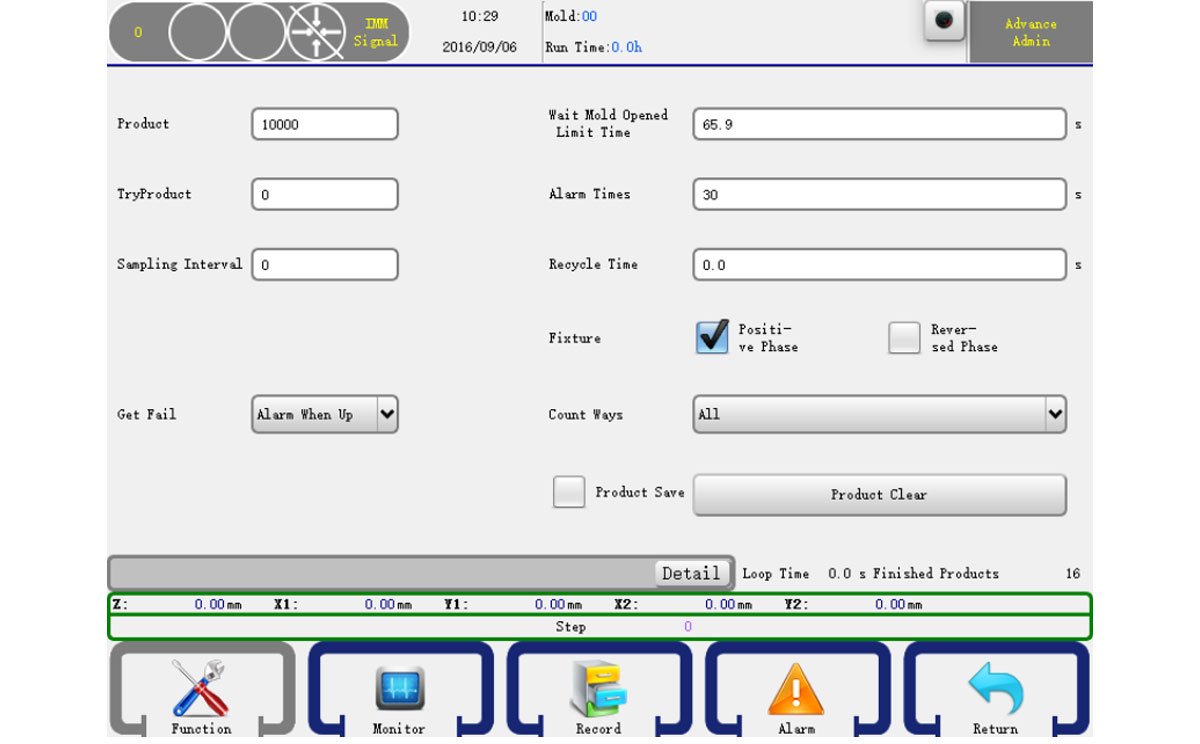
- Продукт: Установка количества продуктов. Когда количество превысит установленное вами значение, сработает сигнализация.
- Опытное производство: Количество изделий для опытного производства.
- Интервал отбора проб: Интервал, в течение которого будет отбираться образец для проверки качества.
- Получить сбой:
Включить сигнализацию: Включить сигнализацию и включить сигнализацию при проверке сигнала сбоя.
Сигнализация: Сигнализация срабатывает сразу после сбоя подбора деталей. - Ограниченное время ожидания открытия формы: Время ожидания сигнала Открытие формы. Робот подаст сигнал тревоги, если время ожидания превысит установленное значение.
- Время тревоги:Время непрерывной тревоги.
- Очистка продукта:Очистка счетчика готовой продукции.
- Время цикла:При выборе функции Форма заблокирована это время между получением системой сигнала Форма закрыта и сигналом Включение формы выключено.
7.3 Конфигурация машины
Нажмите кнопку Настройка машины, чтобы перейти на страницу настройки машины, как показано ниже:
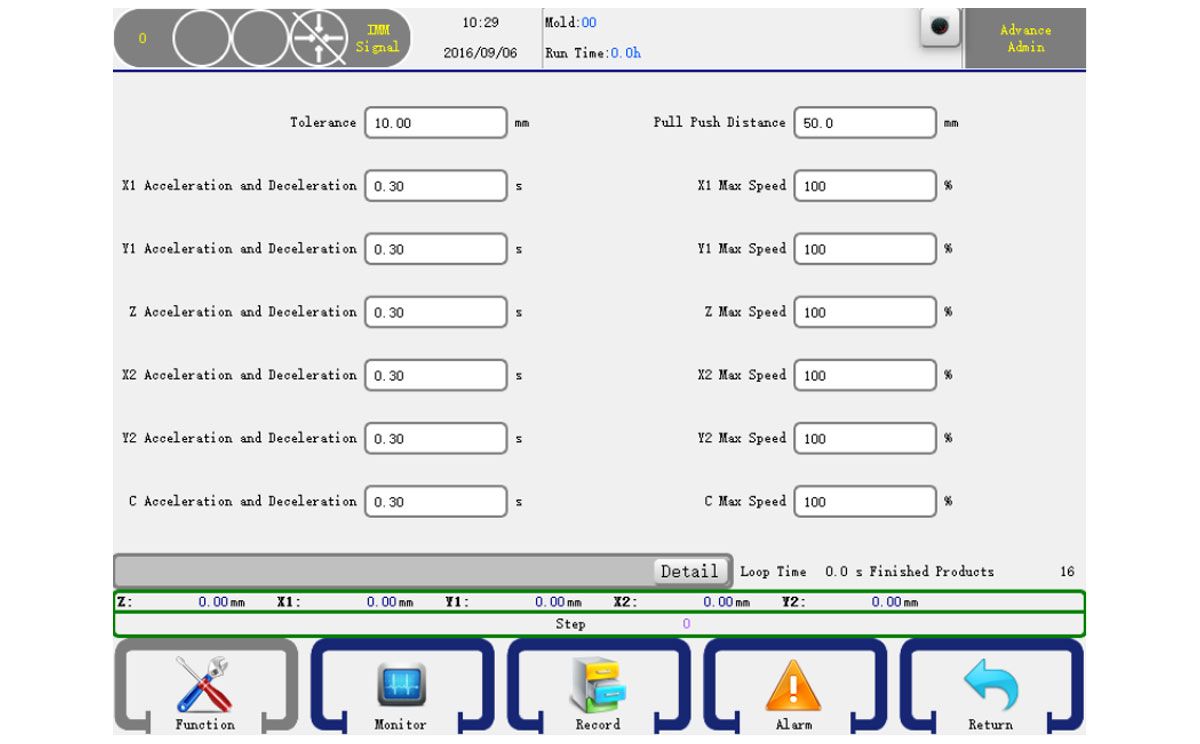
Допуск:Допуск между отправленным импульсом и импульсом обратной связи сервопривода.
Зона безопасности:Зона безопасности между рычагами и вспомогательными рычагами.
Ускорение и замедление по осям X, Y, Z:Время ускорения и замедления по осям сервопривода.
Максимальная скорость по осям X, Y, Z:Максимальная скорость по осям сервопривода.
7.4 Настройки точки безопасности
Нажмите кнопку Настройки точки безопасности, чтобы перейти на страницу настроек точки безопасности, как показано ниже:
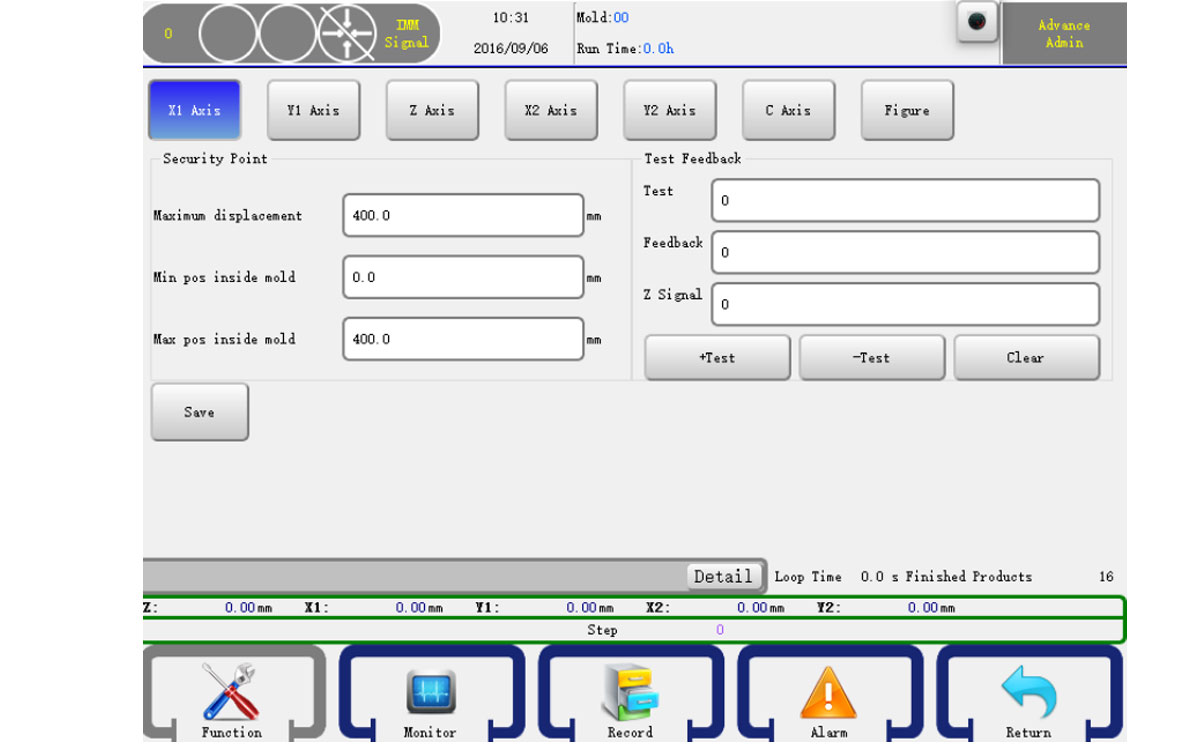
- Нажмите пункт меню X в верхней части экрана, чтобы выбрать нужную ось.
Макс.:Максимальное перемещение оси.
Максим. внутреннее:Максимальное положение, в которое ось может переместиться в станке.
Миним. внутреннее:Минимальное положение, в которое ось может переместиться в станке.
+Тест:Проверка положительного импульса сервопривода.
-Тест:Проверка резервного импульса сервопривода.
Очистить:Очистить данные теста.
После завершения нажмите кнопку set i для подтверждения. - Нажмите пункт меню Y1 в верхней части экрана, чтобы выбрать ось, которую хотите отобразить.
Максимальное положение в режиме ожидания:Установите максимальные точки оси Y1 в режиме ожидания.
Расстояние до начала координат:Положение оси Y1 перед выполнением операции OPR.
Нажмите пункт меню Y1 в верхней части экрана, чтобы выбрать ось, которую хотите отобразить. - Нажмите на пункт меню Z в верхней части экрана, чтобы выбрать нужную ось.
Внутренняя зона безопасности: Установка значения, определяющего зону безопасности внутри станка.
Внешняя зона безопасности: Значение безопасного расстояния снаружи станка. - Нажмите кнопку меню C в верхней части экрана, чтобы выбрать нужную ось.
Безопасный диапазон поперечного перемещения:Безопасный угол при движении в поперечном направлении. - Нажмите пункт меню «Структура» в верхней части. Как показано ниже:
Минимальное увеличение внутри оси X:Минимальное положение по оси X при подъёме рычага в станок.
Максимальное увеличение внутри оси X:Максимальное положение по оси X при подъёме рычага.
Минимальное увеличение снаружи оси Y:Минимальное положение по оси Y при подъёме рычага из станка.
Максимальное увеличение снаружи оси Y:Максимальное положение по оси Y при подъёме рычага.
Внимание:Вы можете изменить минимальное и максимальное положение оси X на странице механических параметров в поле параметра оси X.
7.5 Настройки стека
Щелкните элемент Настройки стека, чтобы перейти на страницу настроек стека, как показано ниже:
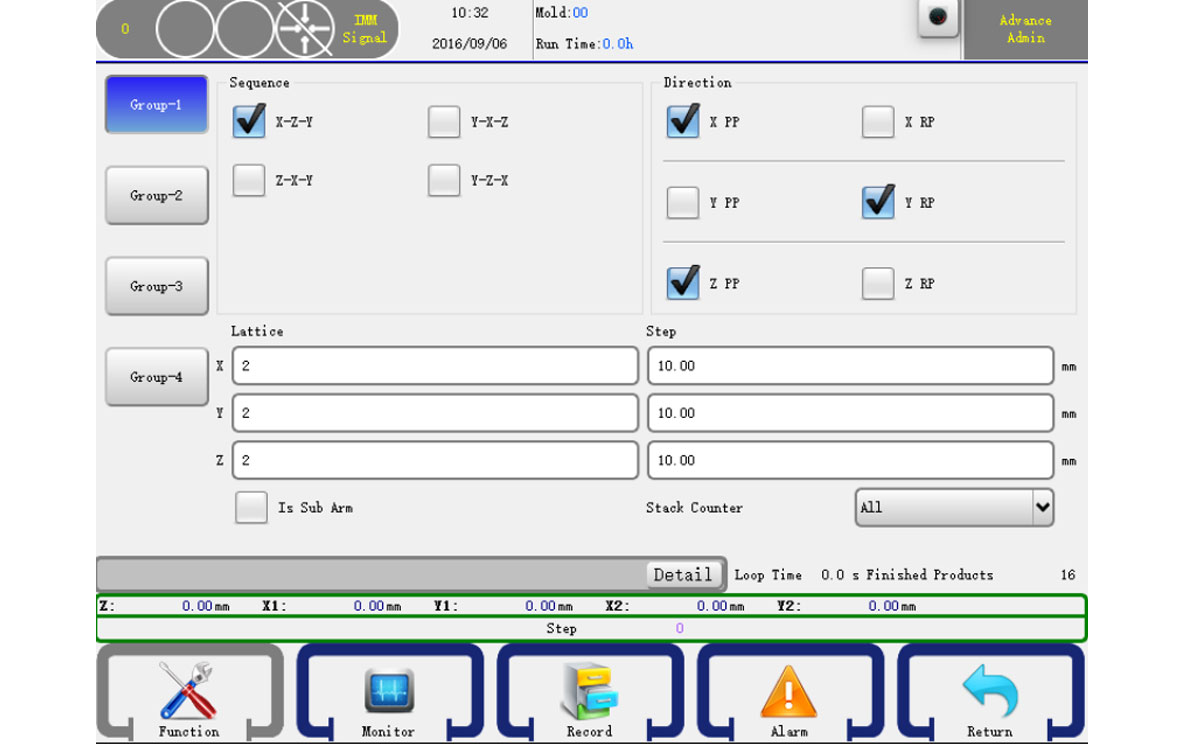
В нашей системе предусмотрено четыре настройки группового стека.
Последовательность:Выберите последовательность стека.
X RP:Если отмечено, робот выполнит стек в обратном направлении по оси X.
Y RP:Если отмечено, робот выполнит стек в обратном направлении по оси Y.
Z RP:Если отмечено, робот выполнит стек в обратном направлении по оси Z.
7.6 Системные настройки
7.6.1 Настройка
Щелкните элемент Системные настройки, чтобы перейти на страницу системных настроек, как показано ниже:
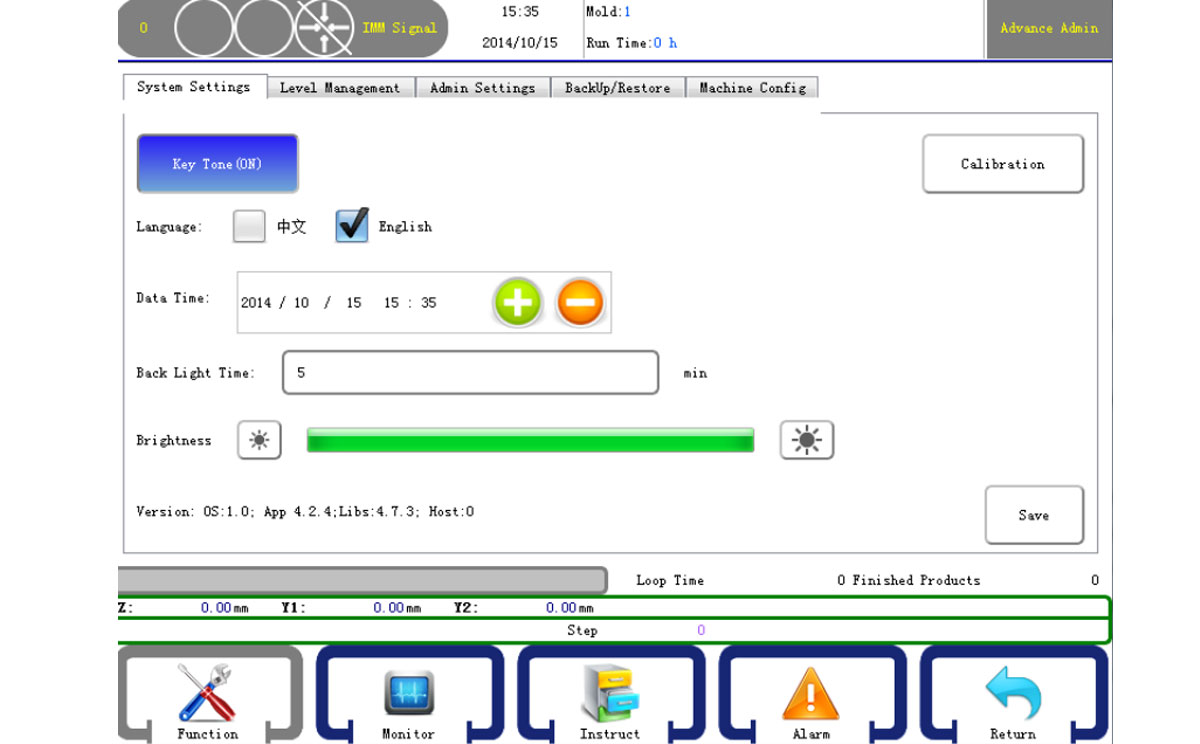
Тон клавиш:При нажатии клавиш раздаётся звуковой сигнал, если клавиатура включена.
Язык:Выберите язык интерфейса.
Дата и время:Установите текущую дату и время.
Время подсветки:Если в установленное время не будет выполнено никаких действий, подсветка выключится.
Версия:Версия системы.
Нажмите Сохранить для подтверждения после завершения настройки системы.
7.6.2 Управление уровнями
Щелкните элемент Управление уровнями, чтобы перейти на страницу настроек системы, как показано ниже:
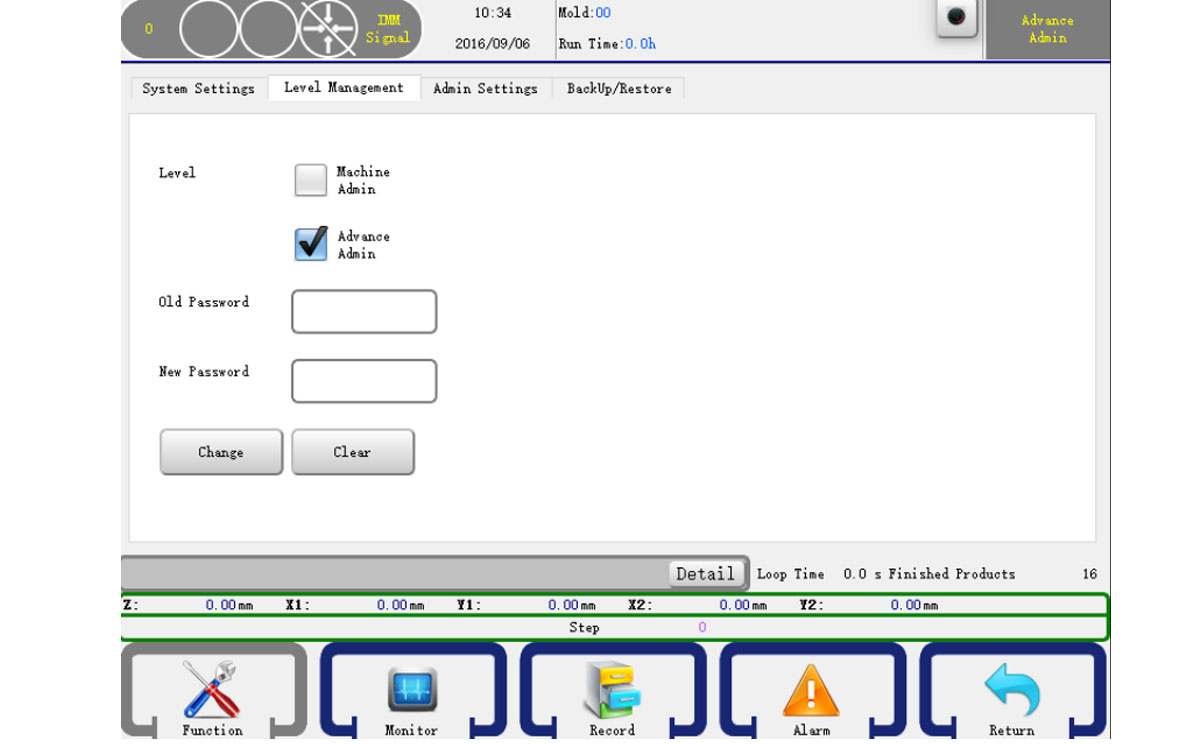
Уровень управления может изменять базовую информацию, а уровень администратора — любые параметры. Введите старый пароль, затем новый и подтвердите, чтобы изменить пароль.
7.6.3 Резервное копирование/восстановление
Нажмите элемент Резервное копирование/Восстановление, чтобы перейти на страницу настроек системы, как показано ниже:
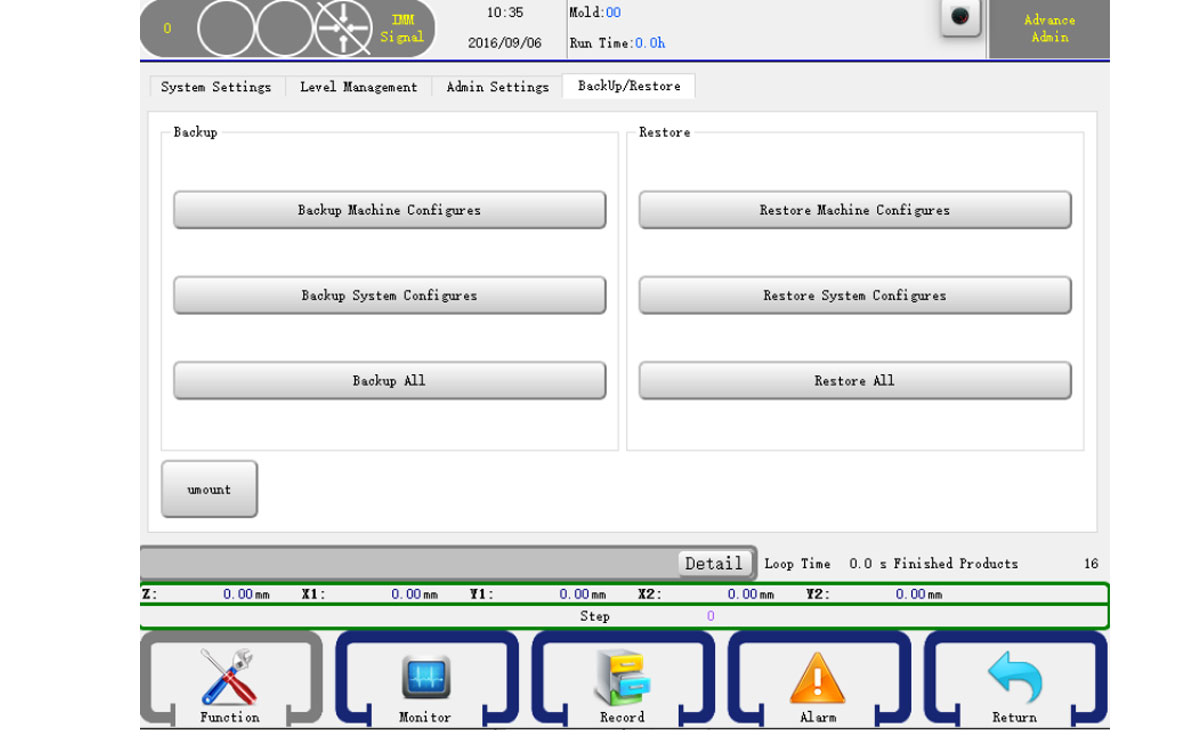
Вы можете использовать USB для резервного копирования или восстановления «Параметры машины», «Параметры системы» и «Параметры пресс-формы» или выбрать все для резервного копирования/восстановления.
7.7 Настройки структуры
Щелкните элемент Настройки структуры, чтобы перейти на страницу настроек структуры, как показано ниже:
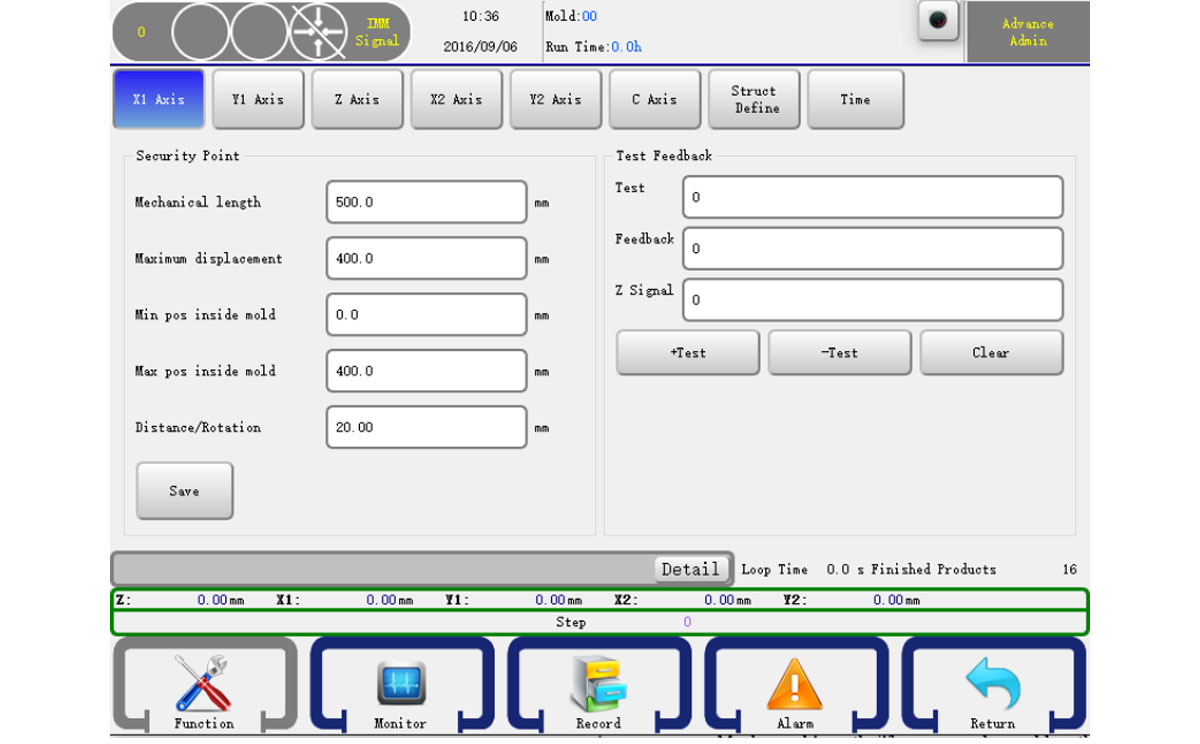
Механическая длина:Механическая длина оси.
Расстояние/Вращение:Расстояние одного оборота сервопривода.
Вы также можете установить другие параметры, например, 5.4. Нажмите кнопку «Сохранить» для подтверждения изменений. ВНИМАНИЕ:Неправильное определение структуры может привести к повреждению машины и травмам! Обратитесь к производителю.
7.8 Поддерживает
Щелкните элемент Обслуживание, чтобы перейти на страницу обслуживания, как показано ниже:
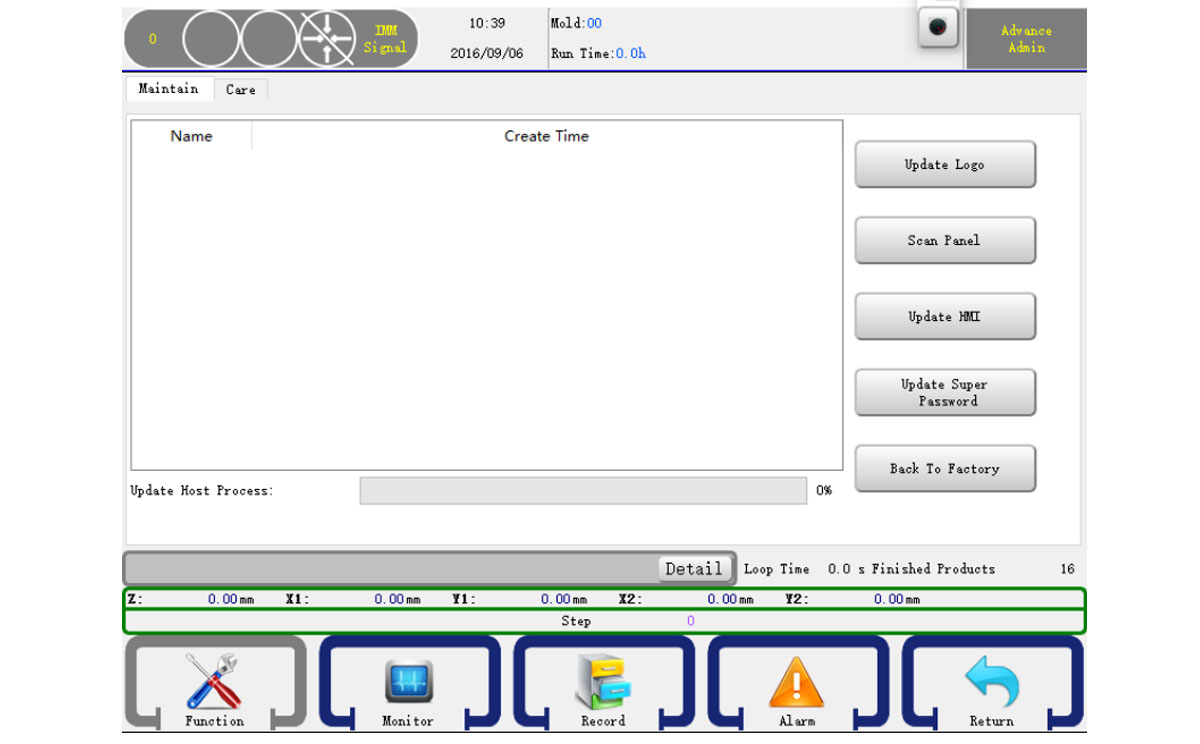
Вы можете обновить систему панели управления с помощью USB-накопителя. Скопируйте пакет обновления системы на USB-диск. Нажмите кнопку «Обновить» и подождите некоторое время. Если система сможет проверить пакет обновления системы с диска, на странице будет отображена версия системы. Если это невозможно, просто нажмите кнопку «Обновить» ещё раз или используйте другой USB-диск. Если пакет обновления системы будет проверен, просто нажмите кнопку «Обновить», чтобы начать обновление системы. После завершения появится сообщение, и система перезагрузится. После этого вы можете отключить USB-диск.







