
sales06@switek.biz

+86 186 5927 5869
sales06@switek.biz
+86 186 5927 5869

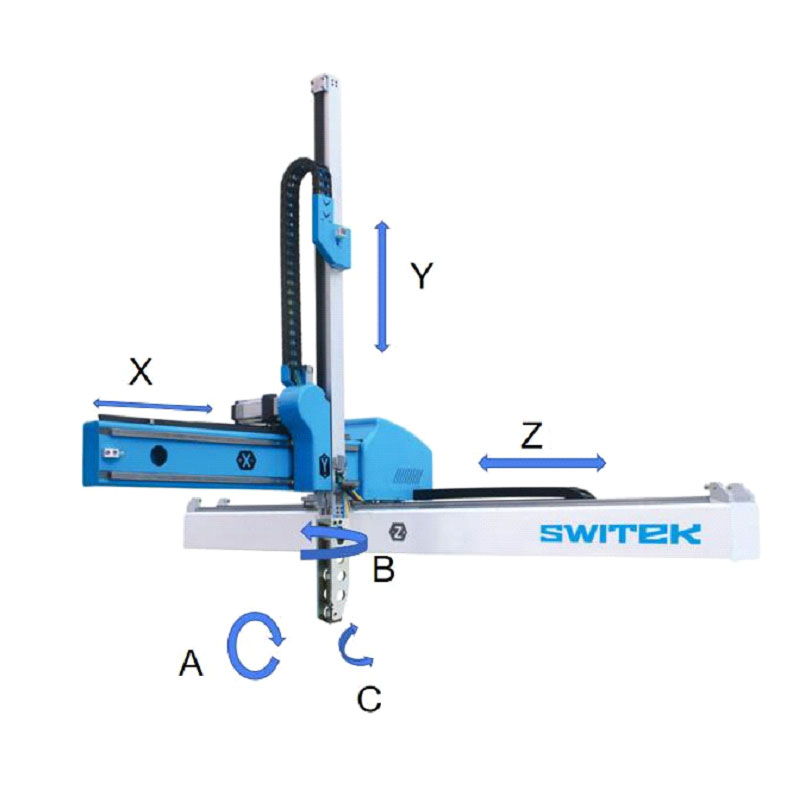
Définition de l'axe
Conseils : Pour sélectionner un robot d'injection adapté à votre projet d'injection de couverts, la vitesse et les cavités du moule seraient la clé paramètres pour la sélection d’un robot approprié. Plus il y a de cavités de moule, plus la taille de l'EOAT sera grande et ce qui signifie une augmentation de la taille et de la charge utile du robot. Surtout pour un système de production de couverts avec emballage en boîte/sac multi-pièces.
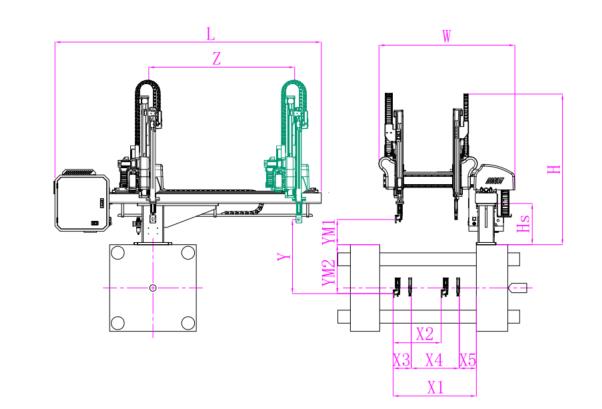
Dimensionnement des robots
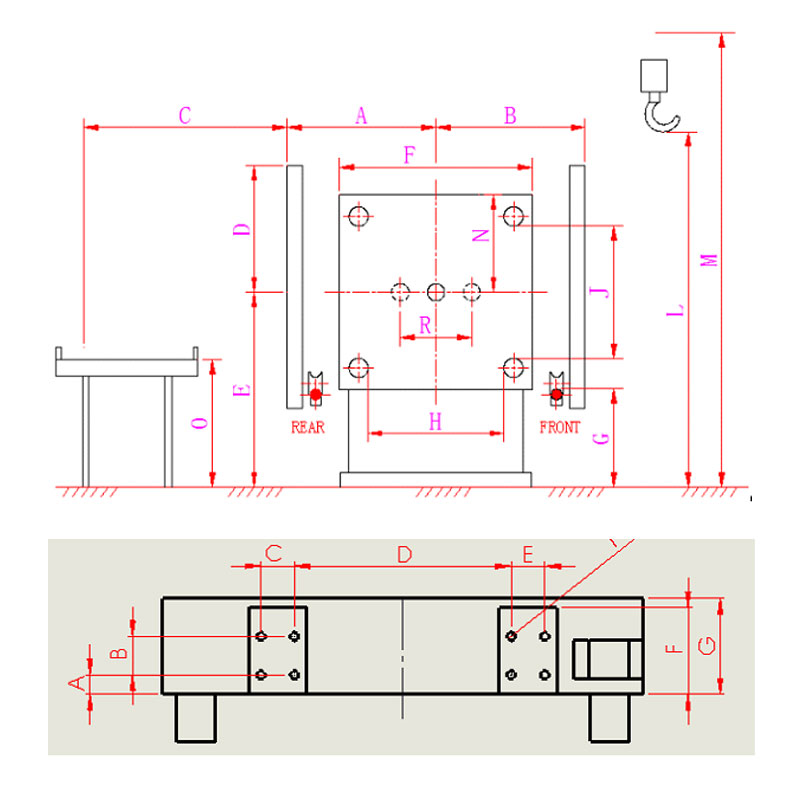
Installation de robots
Tips: Le principe premier de la sélection d’un robot pour votre projet d’automatisation de l’injection est de s’assurer :
Il existe deux types de moules à canaux froids pour couverts :
Le moule à canal froid standard dans lequel les couverts seraient choisis avec le canal, pour ce type de moule, il ne convient pas une solution d'emballage automatique en raison de la déformation imprévisible du canal, cela rendra impossible la découpe réussie du canal.
Le moule à canal froid avec porte sous-marine, pour ce type de moule il est possible de séparer les couverts du canal dans le moule avant le prélèvement robotisé, il convient à un système d'emballage automatique, et la plupart des systèmes d'emballage automatique de couverts à petit budget sont désormais basés sur ce type de moule. C'est une économie solution de système d'emballage automatique de couverts.
Encore une fois, cela dépend de votre budget et de votre équipe technique :
Un moule à disposition ronde a un meilleur équilibre des coureurs mais il n'est pas convivial pour un robot à portique de retirer les couverts bien empilés vers la machine d'emballage, cela signifie un système d'empilage plus complexe ou disposer d'un robot articulaire pour transporter les couverts bien empilés jusqu'à la machine d'emballage.
Un moule rectangulaire est compatible avec un système d'emballage de couverts à deux portiques et la plupart des systèmes d'emballage de couverts à petit budget sont basés sur ce type. de conception de moules.
Le partage d'un système d'automatisation pour différents produits est l'attente commune de nombreux petits et moyens producteurs de couverts, mais ce n'est pas facile à réaliser. cela est devenu réalité en raison de la forme différente entre ces produits. La solution est de réaliser une station de collecte indépendante et un EOAT pour chaque produit et d'avoir les remplacés à chaque changement de moule.
Pour un système d’automatisation d’emballage de couverts, les informations dont nous avons besoin seraient :
PS : Si vous avez d'autres questions sur le démarrage d'un système d'automatisation d'emballage de couverts, n'hésitez pas à nous envoyer un e-mail ou à nous contacter. nous par Wechat/Whatsapp pour une communication instantanée.
Contactez-nous
sales06@switek.biz
+86 186 5927 5869

DongGuan, GuangDong, China
Machines d'injection pour la production de coutellerie




