
sales06@switek.biz

+86 186 5927 5869
sales06@switek.biz
+86 186 5927 5869

Axis Definition
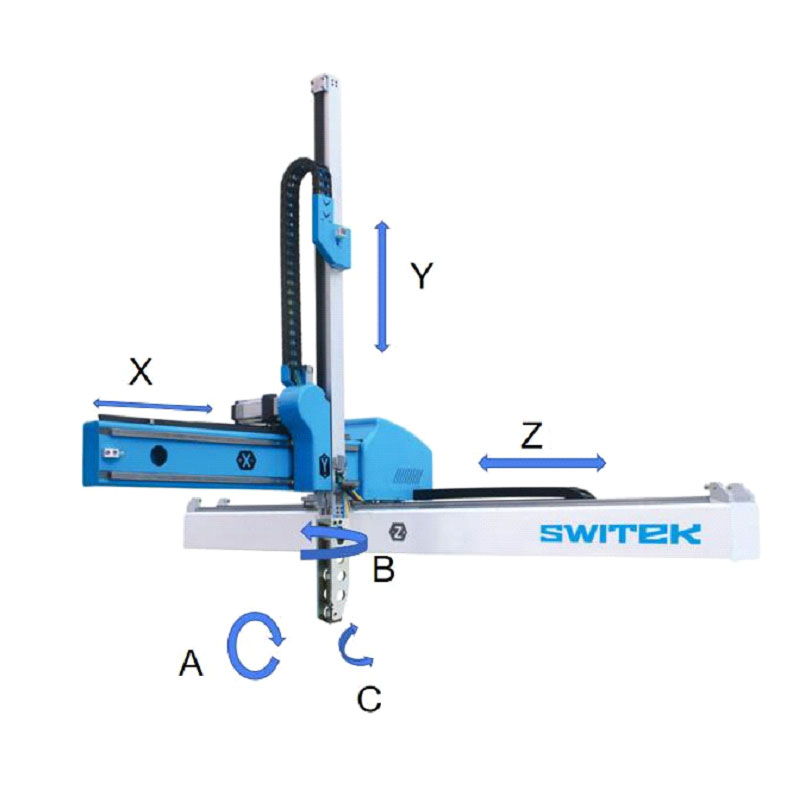
Tips: To select a suitable injection robot for your cutlery injection project, the speed and the cavities of the mould would be the key parameters for a selection of a suitable robot. The more of the mold cavities, the larger would be the size of the EOAT and which means an increase of the robot size and payload. Especially for an cutlery production system of multi-pcs box/bag packing.
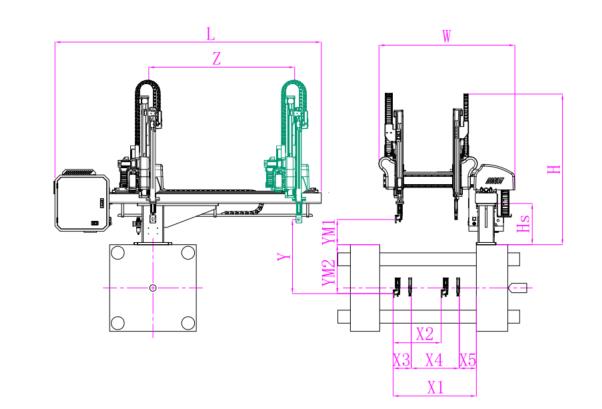
Robot Sizing
Robot Installation
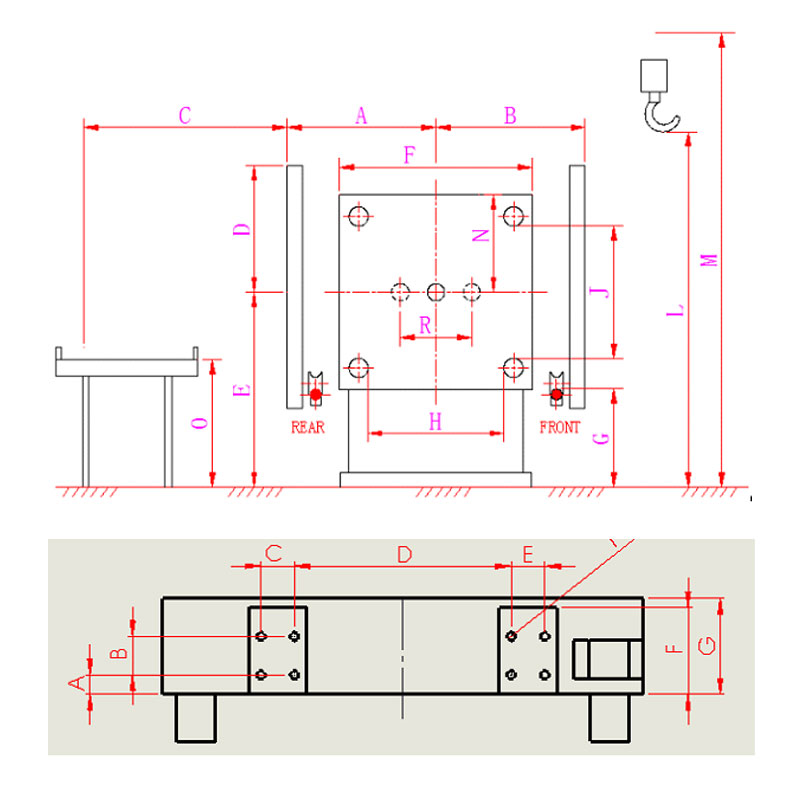
Tips: The primary principle of selecting a robot for your injection automatio project is that to make sure:
There're two kind of cold runner molds for cutlery:
The standard cold runner mold which the cutlery would be picked out with the runner, for this kind of mold it's not suitable for an auto-packing solution because of the unpredicatable deformation of the runner, it'll make the successful cutting of the runner impossible.
The cold runner mold with submarine gate, for this kind of mold it's possible to seperate the cutlery from the runner in mold before robot picking, it's suitable for an auto-packing system, and most of the low budget cutlery auto-packing systems now are based on these kind of mold. It's an econonic solution of cutlery auto-packing system.
Again it'll depends on your budget and your technical team:
A round layout mould have a better runner balance but it's not friendly to a gantry robot to remove the well stacked cutlery to the packing machine, it means a more complex stacking system or have an articular robot to carry the well stacked cutlery to the packing machine.
A rectangular layout mould is friendly to a two gantry robots cutlery packing system and most of the low budget cutlery packing system is based on this kind of mold design.
The sharing of one automation system for different products is the common expectation of many small and medium producers of cutlery, but it's not easy to make it come true because of the different shape between these products. The solution is to make an independent collecting station and EOAT for each products and have them replaced in every mold changing.
For a cutlery packing automation system, the information what we need would be:
PS: If you have any other questions about starting up a cutlery packing automation system, please feel free to send us an e-mail or contact us by Wechat/Whatsapp for instant communication.
Contact Us
sales06@switek.biz
+86 186 5927 5869

DongGuan, GuangDong, China
Injection Machinery for Cutlery Production




