
sales06@switek.biz

+86 186 5927 5869
sales06@switek.biz
+86 186 5927 5869

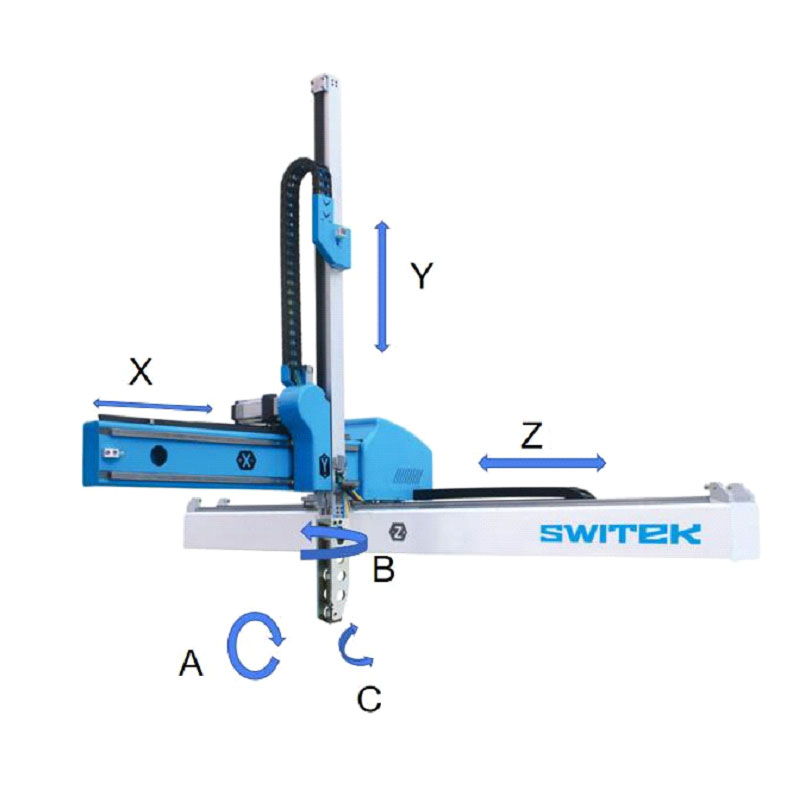
Definizione dell'asse
Suggerimenti: per selezionare un robot di iniezione adatto per il tuo progetto di iniezione di posate, la velocità e le cavità dello stampo sarebbero i parametri chiave per la selezione di un robot adatto. Più cavità dello stampo sono, più grande sarà la dimensione dell'EOAT e ciò significa un aumento delle dimensioni e del carico utile del robot. Soprattutto per un sistema di produzione di posate con imballaggio di scatole/sacchetti multi-pezzo.
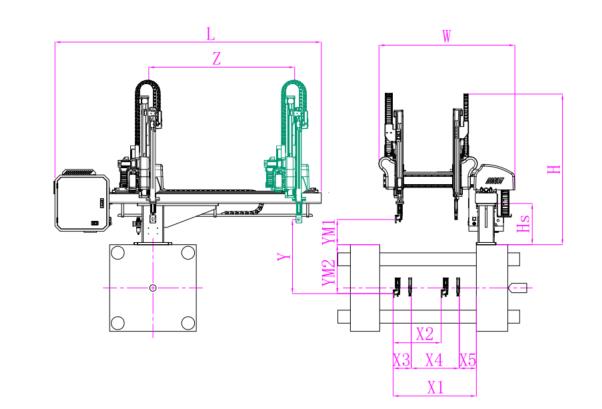
Dimensionamento del robot
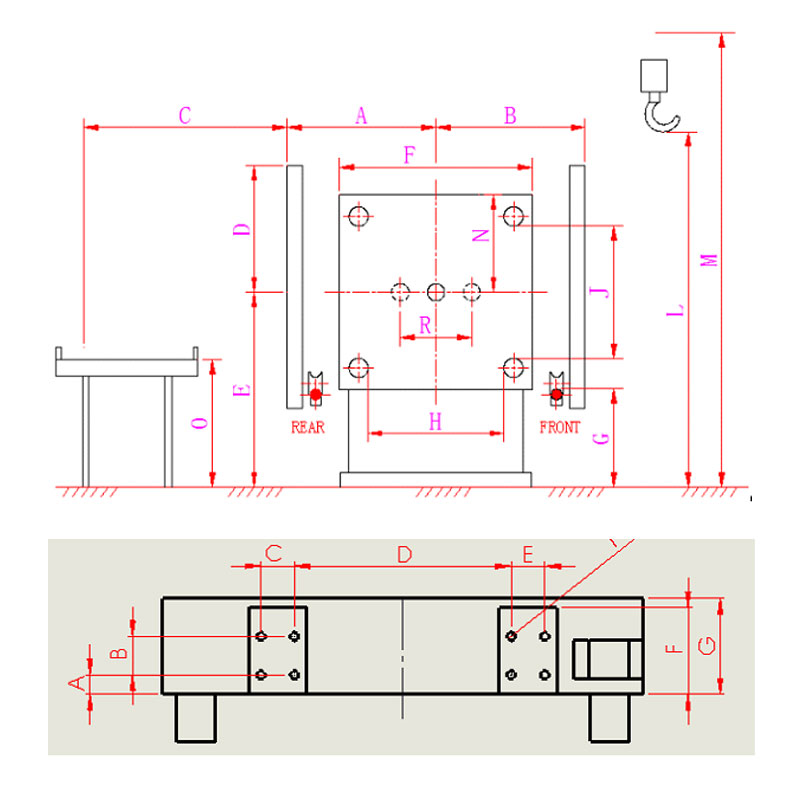
Installazione del robot
Suggerimenti: Il principio fondamentale per la scelta di un robot per il tuo progetto di iniezione automatica è assicurarsi che:
Esistono due tipi di stampi a canale freddo per le posate:
Lo stampo standard a canale freddo in cui le posate verrebbero raccolte con il canale, per questo tipo di stampo non è adatto per una soluzione di confezionamento automatico a causa della deformazione imprevedibile del canale, che renderebbe impossibile il taglio corretto del canale.
Lo stampo a canale freddo con porta sottomarina, per questo tipo di stampo è possibile separare le posate dal canale nello stampo prima del prelievo del robot, è adatto per un sistema di confezionamento automatico e la maggior parte dei sistemi di confezionamento automatico delle posate a basso costo ora si basa su questo tipo di stampo. È una soluzione economica del sistema di confezionamento automatico delle posate.
Anche in questo caso, tutto dipenderà dal tuo budget e dal tuo team tecnico:
Uno stampo con disposizione rotonda ha un migliore bilanciamento del canale di colata, ma non è adatto a un robot a portale per rimuovere le posate ben impilate verso la macchina imballatrice, significa un sistema di impilamento più complesso o un robot articolato per trasportare le posate ben impilate verso la macchina imballatrice.
Uno stampo con layout rettangolare è compatibile con un sistema di imballaggio delle posate a due robot a portale e la maggior parte dei sistemi di imballaggio delle posate a basso costo si basa su questo tipo di progettazione dello stampo.
La condivisione di un sistema di automazione per prodotti diversi è l'aspettativa comune di molti piccoli e medi produttori di posate, ma non è facile realizzarla a causa della diversa forma tra questi prodotti. La soluzione è quella di realizzare una stazione di raccolta e un EOAT indipendenti per ogni prodotto e di sostituirli a ogni cambio di stampo.
Per un sistema di automazione dell'imballaggio delle posate, le informazioni di cui abbiamo bisogno sarebbero:
P.S.: Se hai altre domande sull'avvio di un sistema di automazione per l'imballaggio delle posate, non esitare a inviarci un'e-mail o a contattarci tramite Wechat/Whatsapp per una comunicazione immediata.
Notizie e notizie sull'automazione dell'iniezione


E-mail: sales@switek.biz
Contattaci
sales06@switek.biz
+86 186 5927 5869

DongGuan, GuangDong, China
Macchinari ad iniezione per la produzione di posate




