
sales06@switek.biz

+86 186 5927 5869
sales06@switek.biz
+86 186 5927 5869

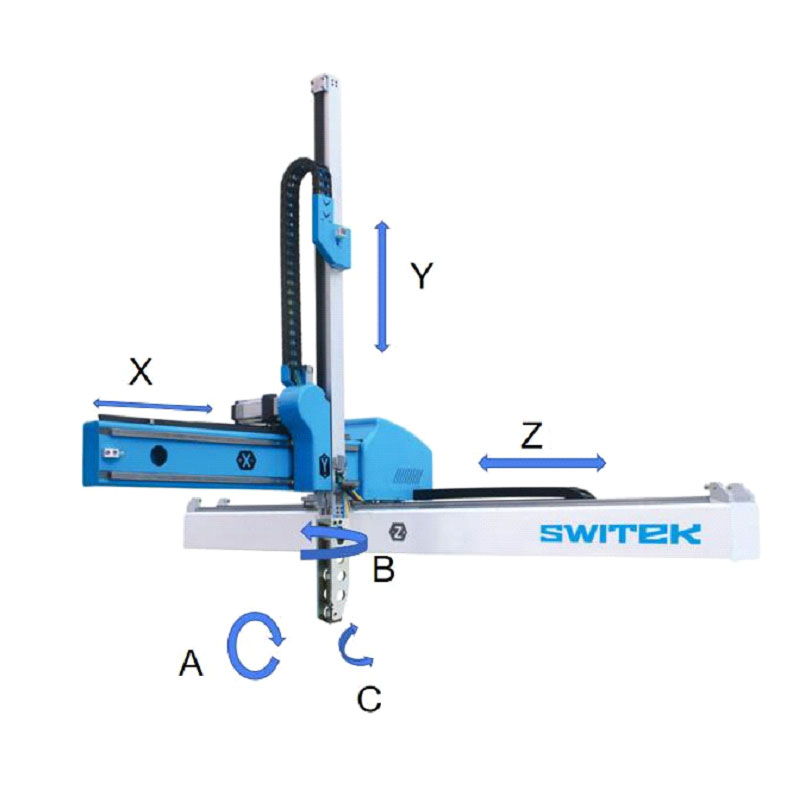
軸の定義
ヒント: カトラリー射出成形プロジェクトに適した射出成形ロボットを選択するには、金型の速度とキャビティが適切なロボットを選択するための重要なパラメータになります。金型のキャビティの数が多いほど、EOAT のサイズが大きくなり、ロボットのサイズと積載量が増加します。特に、複数個の箱/袋詰めのカトラリー生産システムの場合に当てはまります。
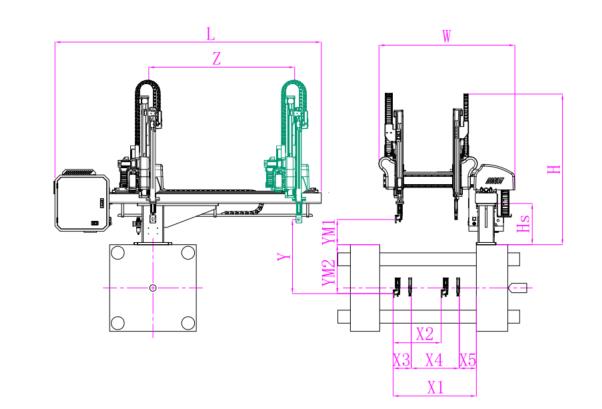
ロボットのサイズ
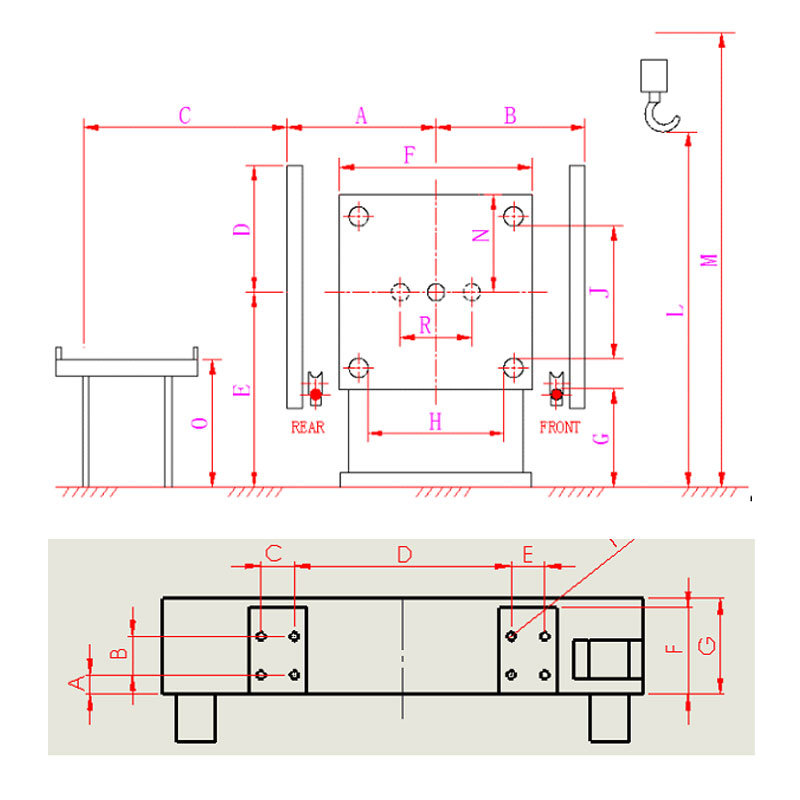
ロボットの設置
ヒント: 注入自動化プロジェクト用のロボットを選択する際の基本原則は、次の点を確認することです。
カトラリー用のコールドランナー金型には 2 種類あります。
カトラリーがランナーとともに取り出される標準的なコールドランナー金型は、ランナーの予測不可能な変形によりランナーの切断が不可能になるため、自動梱包ソリューションには適していません。
サブマリンゲートを備えたコールドランナー金型は、ロボットによるピッキングの前に金型内でカトラリーをランナーから分離することが可能で、自動梱包システムに適しており、現在、低予算のカトラリー自動梱包システムのほとんどは、この金型をベースにしています。これは、カトラリー自動梱包システムの経済的なソリューションです。
これも予算と技術チームによって異なります。
円形レイアウトの金型はランナーバランスが優れていますが、ガントリーロボットが積み重ねられたカトラリーを梱包機に取り出すのには適していません。つまり、より複雑な積み重ねシステムを使用するか、積み重ねられたカトラリーを梱包機に運ぶ関節型ロボットが必要になります。
長方形レイアウトの金型は、2 つのガントリー ロボットのカトラリー梱包システムに適しており、低予算のカトラリー梱包システムのほとんどは、この種の金型設計に基づいています。
異なる製品に 1 つの自動化システムを共有することは、多くの中小カトラリー製造業者の共通の期待ですが、製品の形状が異なるため、これを実現するのは簡単ではありません。解決策は、各製品ごとに独立した収集ステーションと EOAT を作成し、金型を交換するたびにそれらを交換することです。
カトラリー梱包自動化システムの場合、必要な情報は次のとおりです。
追記: カトラリー梱包自動化システムの立ち上げについて他にご質問がございましたら、お気軽にメールをお送りいただくか、Wechat/Whatsapp でご連絡いただき、すぐにご連絡ください。
お問い合わせ
sales06@switek.biz
+86 186 5927 5869

DongGuan, GuangDong, China
カトラリー製造用射出成形機




