
sales06@switek.biz

+86 186 5927 5869
sales06@switek.biz
+86 186 5927 5869

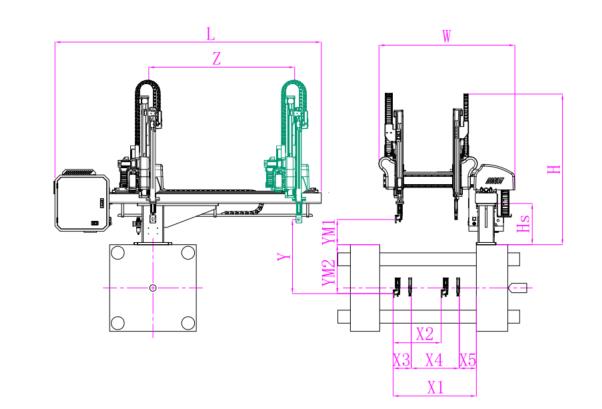
축 정의

팁: 칼 붙이 사출 프로젝트에 적합한 사출 로봇을 선택하려면 금형의 속도와 캐비티가 적합한 로봇을 선택하는 데 중요한 매개변수가 됩니다. 금형 캐비티가 많을수록 EOAT의 크기가 커지고 이는 로봇 크기와 탑재량이 증가함을 의미합니다. 특히 여러 개의 상자/가방 포장을 하는 칼 붙이 생산 시스템의 경우 더욱 그렇습니다.
로봇 크기
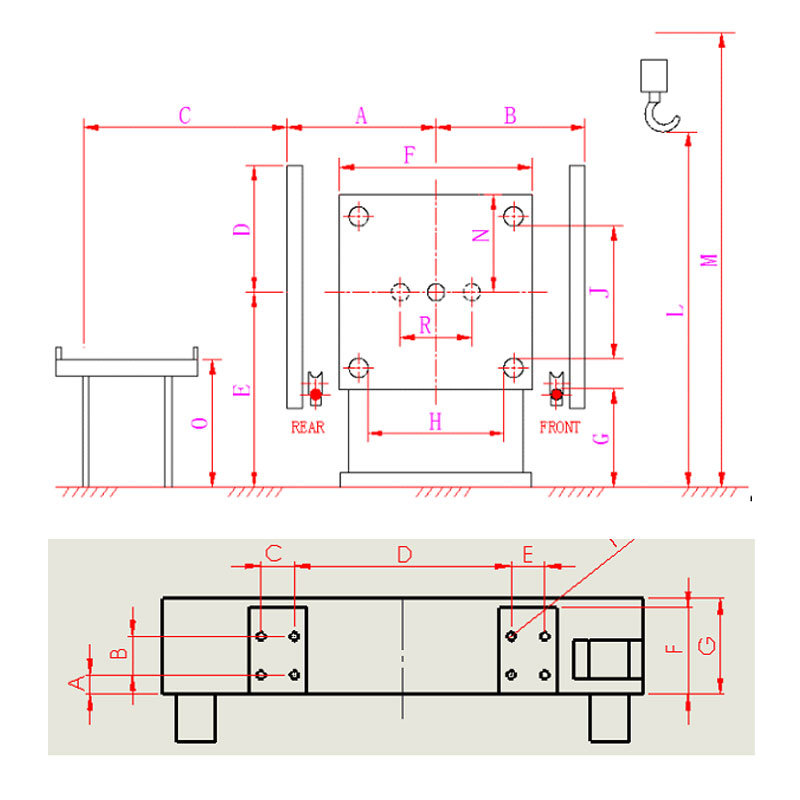
로봇 설치
Tips: 사출 자동화 프로젝트에 로봇을 선택하는 주요 원칙은 다음 사항을 확인하는 것입니다.
칼 붙이용 콜드 러너 몰드에는 두 가지 종류가 있습니다.
런너와 함께 칼을 집어 올리는 표준 콜드 러너 몰드, 이런 종류의 몰드는 런너의 예측할 수 없는 변형으로 인해 자동 포장 솔루션에 적합하지 않으며 런너를 성공적으로 자르는 것이 불가능합니다.
잠수함 게이트가 있는 콜드 러너 몰드, 이런 종류의 몰드에서는 로봇 피킹 전에 몰드에서 런너에서 칼을 분리할 수 있습니다. 자동 포장 시스템에 적합하며, 현재 대부분의 저예산 칼 자동 포장 시스템은 이런 종류의 몰드를 기반으로 합니다. 칼 자동 포장 시스템의 경제적인 솔루션입니다.
다시 말해서 이는 귀하의 예산과 기술 팀에 따라 달라집니다.
원형 레이아웃 몰드는 런너 밸런스가 더 좋지만, 잘 쌓인 칼을 포장 기계로 옮기는 건트리 로봇에 친화적이지 않습니다. 더 복잡한 스태킹 시스템이 필요하거나, 잘 쌓인 칼을 포장 기계로 옮기는 관절 로봇이 필요합니다.
직사각형 레이아웃 몰드는 2개의 갠트리 로봇 칼 붙이 포장 시스템에 적합하며 대부분의 저예산 칼 붙이 포장 시스템은 이러한 종류의 몰드 설계를 기반으로 합니다.
다양한 제품에 하나의 자동화 시스템을 공유하는 것은 많은 중소 칼 생산업체의 공통적인 기대이지만, 이러한 제품 간의 모양이 다르기 때문에 실현하기 쉽지 않습니다. 해결책은 각 제품에 대한 독립적인 수집 스테이션과 EOAT를 만들고 금형을 교체할 때마다 교체하는 것입니다.
칼 붙이 포장 자동화 시스템의 경우 필요한 정보는 다음과 같습니다.
추신: 칼 포장 자동화 시스템 시작에 대한 다른 질문이 있으면 언제든지 이메일을 보내거나 Wechat/Whatsapp으로 문의해 주시면 즉시 소통할 수 있습니다.
문의하기
sales06@switek.biz
+86 186 5927 5869

DongGuan, GuangDong, China
칼 생산용 사출 기계




