
sales06@switek.biz

+86 186 5927 5869
sales06@switek.biz
+86 186 5927 5869

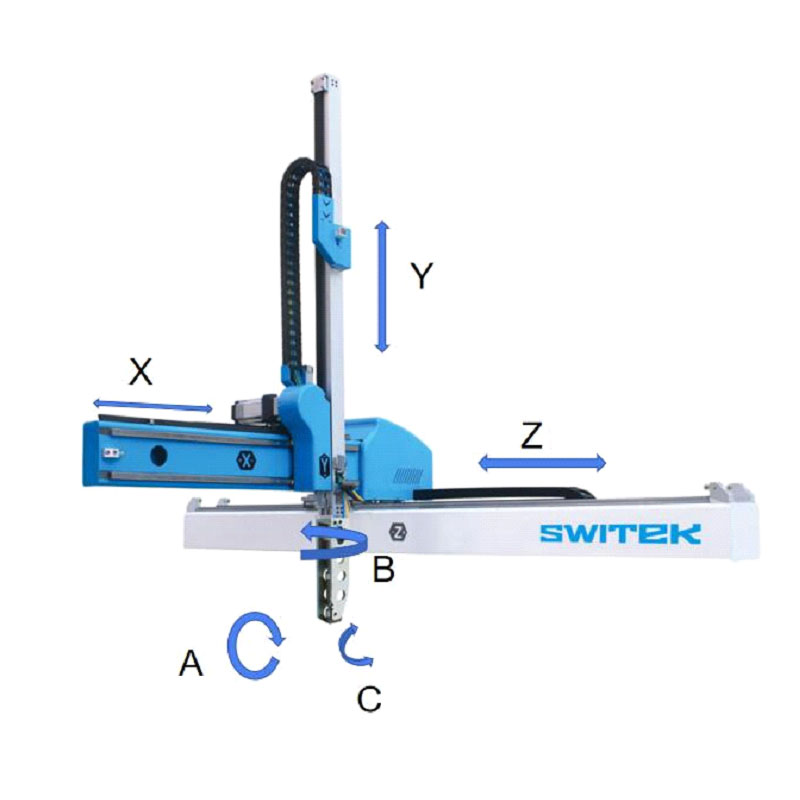
Definición de eje
Consejos: Para seleccionar un robot de inyección adecuado para su proyecto de inyección de cubiertos, la velocidad y las cavidades del molde serían los parámetros clave para la selección de un robot adecuado. Cuantas más cavidades tenga el molde, mayor será el tamaño del extremo del molde, lo que significa un aumento del tamaño del robot y de la carga útil. Especialmente para un sistema de producción de cubiertos de embalaje en cajas o bolsas de varias piezas.
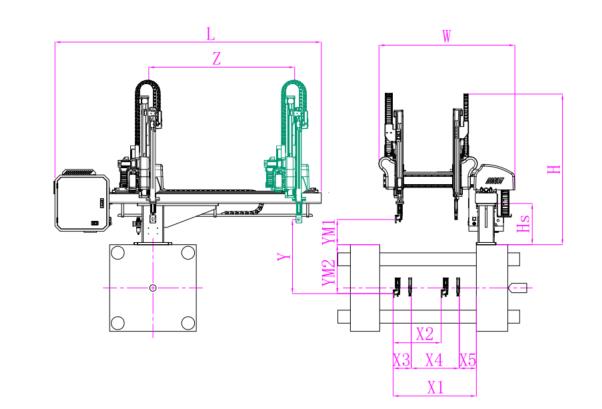
Dimensionamiento del robot
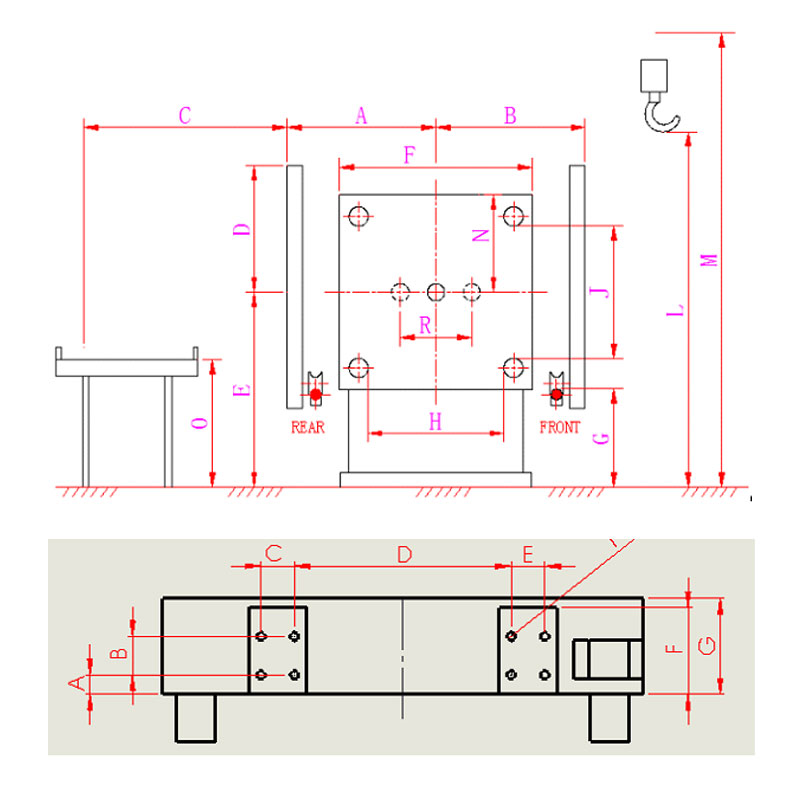
Instalación de robot
Consejos: El principio principal a la hora de seleccionar un robot para su proyecto de automatización de inyección es asegurarse de que:
Hay dos tipos de moldes de canal frío para cubiertos:
El molde de canal frío estándar en el que se extraen los cubiertos con el canal, para este tipo de molde no es adecuado para una solución de envasado automático debido a la deformación impredecible del canal, que hará que el corte exitoso del canal sea imposible.
El molde de canal frío con compuerta submarina permite separar los cubiertos del canal en el molde antes de la selección por robot. Es adecuado para un sistema de empaquetado automático y la mayoría de los sistemas de empaquetado automático de cubiertos de bajo presupuesto se basan en este tipo de molde. Es una solución económica para el sistema de empaquetado automático de cubiertos.
Nuevamente dependerá de tu presupuesto y de tu equipo técnico:
Un molde de diseño redondo tiene un mejor equilibrio del corredor, pero no es compatible con un robot de pórtico para retirar los cubiertos bien apilados a la máquina empacadora; significa un sistema de apilamiento más complejo o tener un robot articulado para llevar los cubiertos bien apilados a la máquina empacadora.
Un molde de diseño rectangular es compatible con un sistema de embalaje de cubiertos con dos robots de pórtico y la mayoría de los sistemas de embalaje de cubiertos de bajo presupuesto se basan en este tipo de diseño de molde.
Compartir un sistema de automatización para diferentes productos es una expectativa común de muchos pequeños y medianos productores de cuchillería, pero no es fácil hacerlo realidad debido a las diferentes formas de estos productos. La solución es crear una estación de recolección independiente y un EOAT para cada producto y reemplazarlos en cada cambio de molde.
Para un sistema de automatización de embalaje de cubiertos, la información que necesitaríamos sería:
PD: Si tiene alguna otra pregunta sobre cómo poner en marcha un sistema de automatización de embalaje de cubiertos, no dude en enviarnos un correo electrónico o contactarnos por WeChat/Whatsapp para una comunicación instantánea.
Contacta con nosotros
sales06@switek.biz
+86 186 5927 5869

DongGuan, GuangDong, China
Maquinaria de inyección para la producción de cubiertos




