
sales06@switek.biz

+86 186 5927 5869

Подпишитесь на нас
sales06@switek.biz
+86 186 5927 5869
Подпишитесь на нас
Работа роботизированных рук требует взаимодействия системы управления и механической конструкции, а электрическая плата служит связующим звеном между системой управления и механической конструкцией роботизированных рук. В этой главе мы рассмотрим определение портов плат, установленных в роботизированных руках.
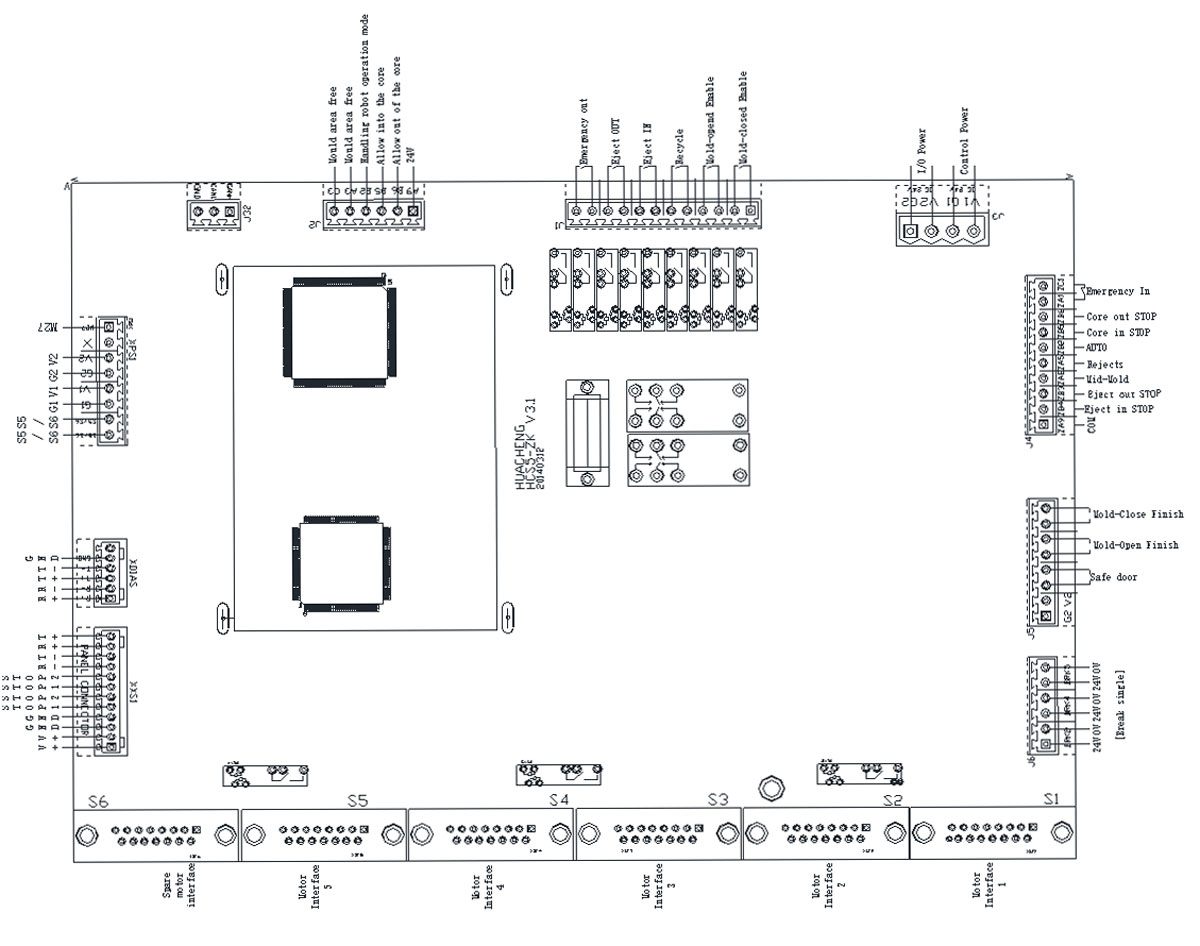
На рисунке выше показано расположение портов на основной плате 5-осевого роботизированного манипулятора с сервоприводом SWITEK.
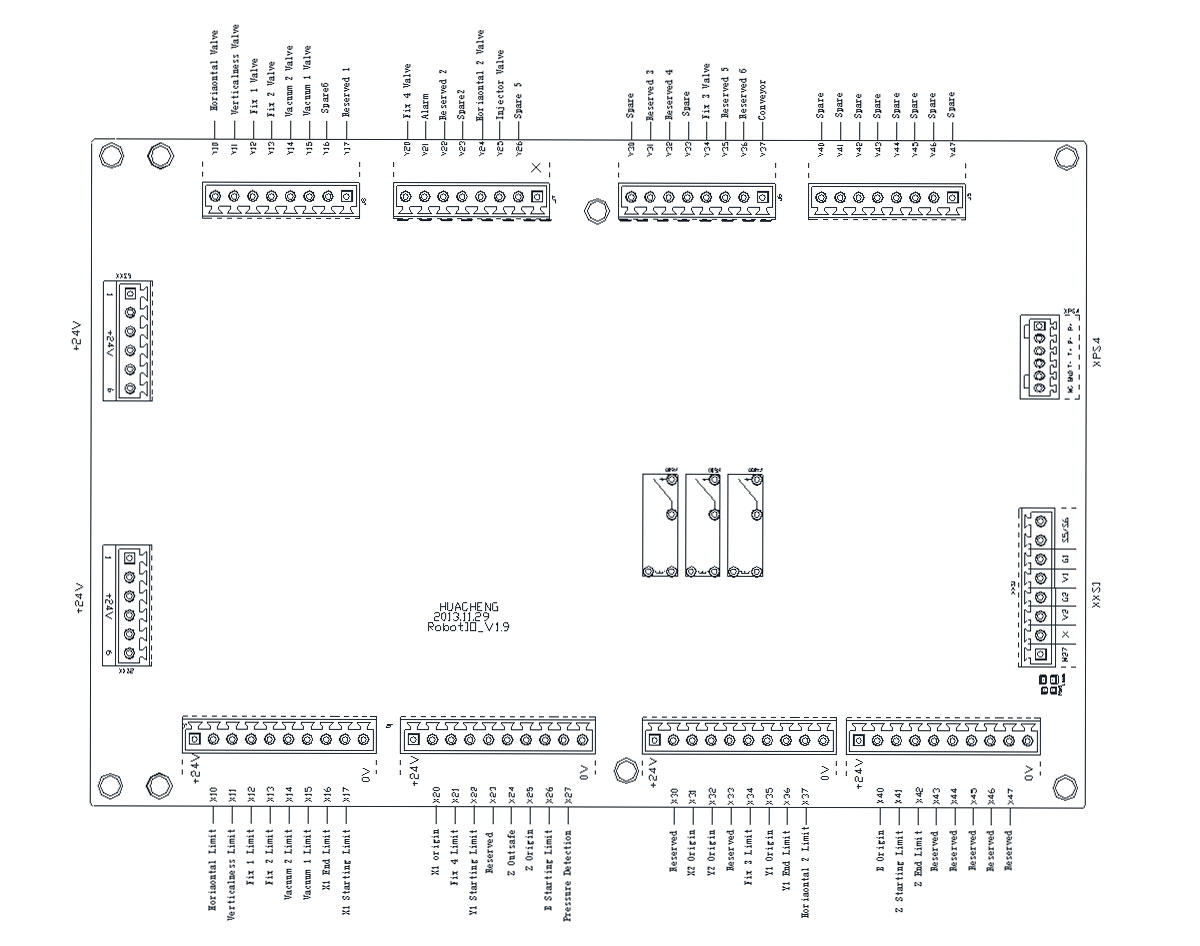
На рисунке выше показано назначение портов платы ввода-вывода пятикоординатного сервоинжекционного робота-манипулятора SWITEK.
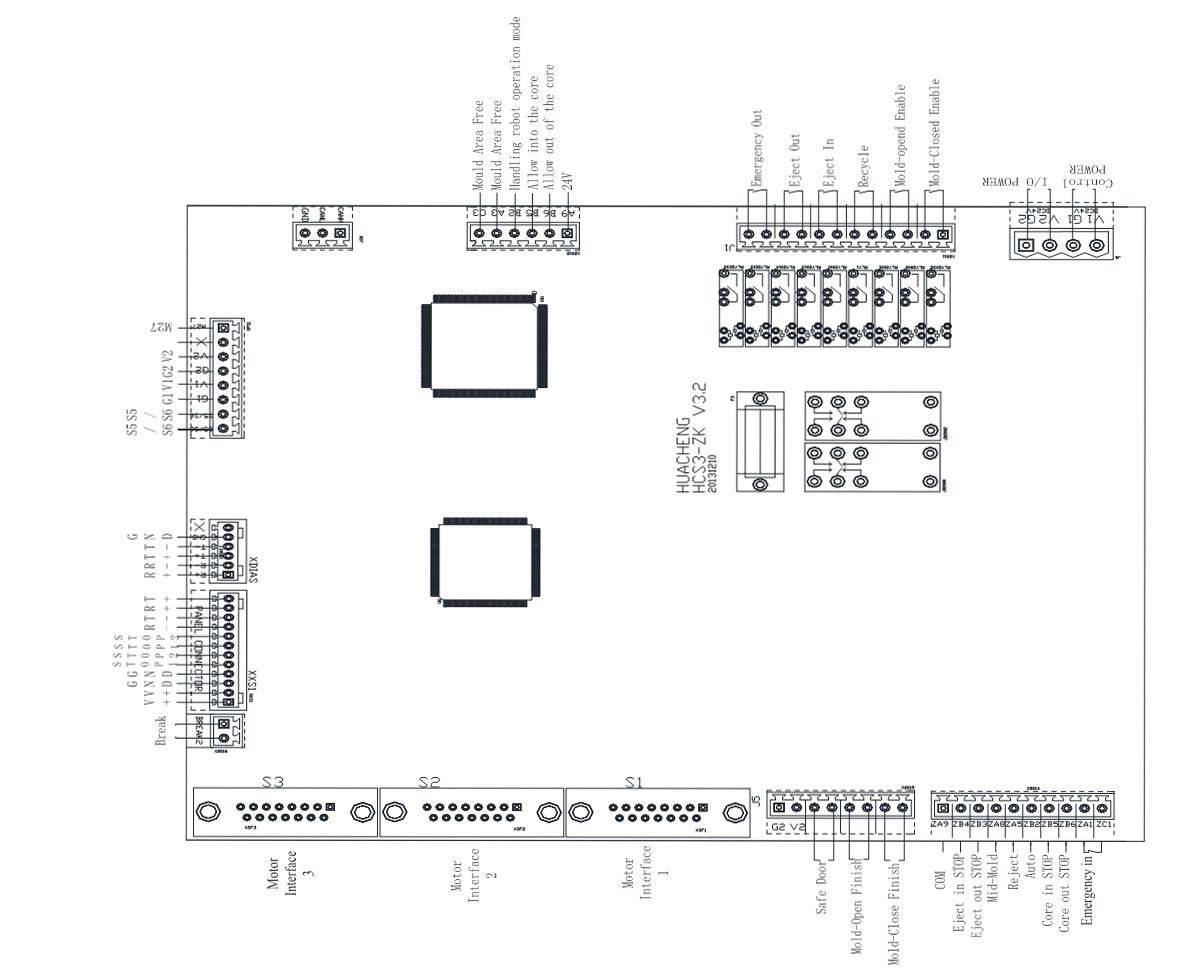
На рисунке выше показано расположение портов на основной плате трехкоординатного сервоинжекционного робота-манипулятора SWITEK.
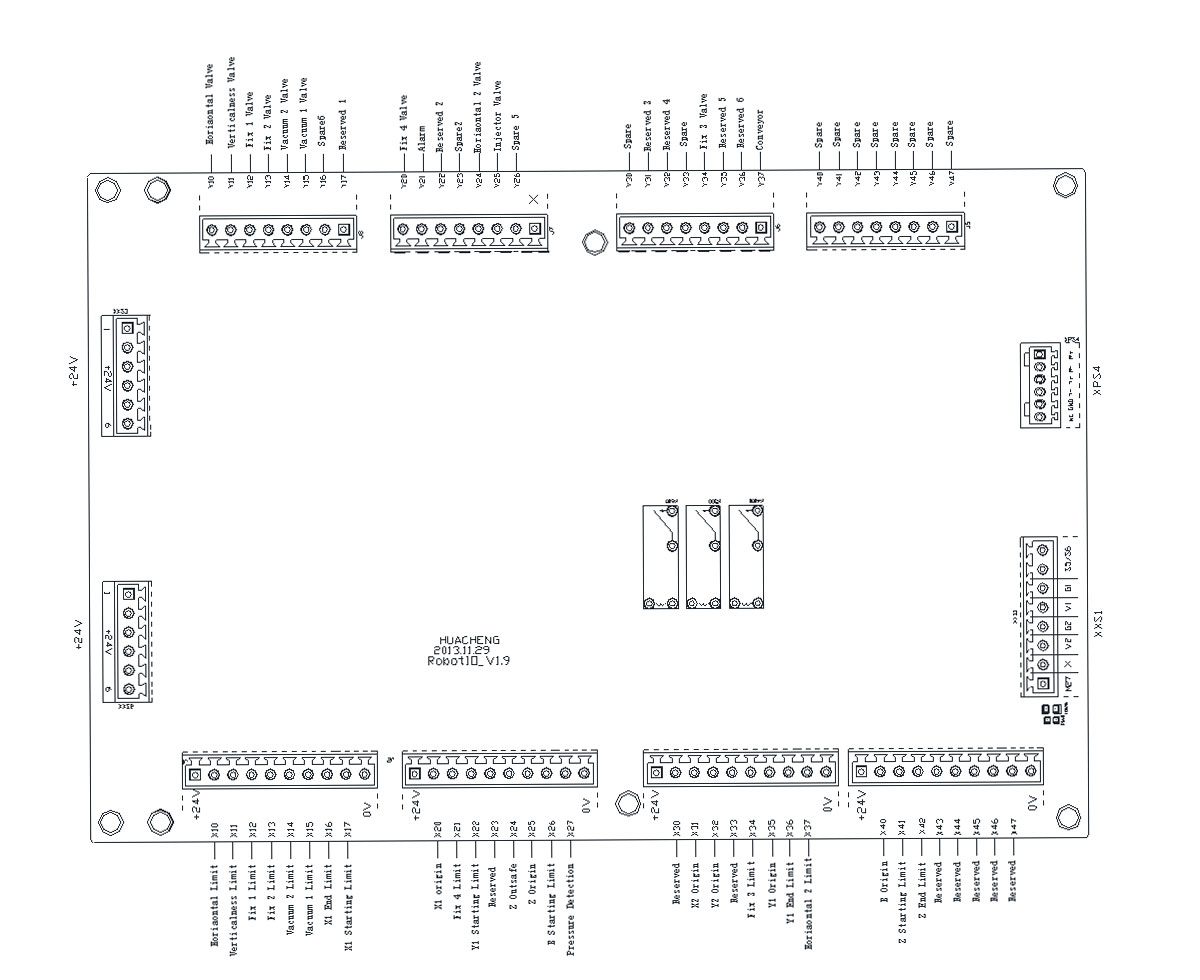
На рисунке выше показано назначение портов платы ввода-вывода трехкоординатного сервоинжекторного робота-манипулятора SWITEK.
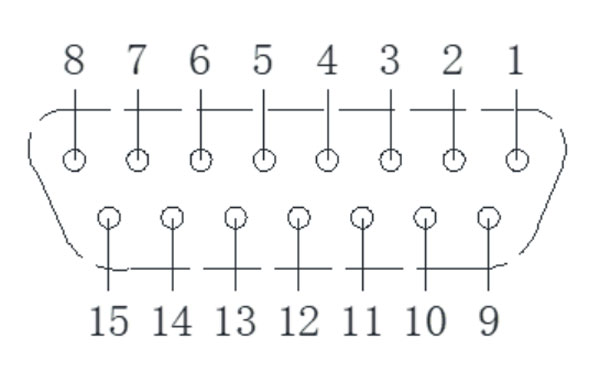
| Номер контакта | Определение терминала | Номер контакта | Определение терминала |
|---|---|---|---|
| 1 | +24V | 9 | 0V |
| 2 | OA+ | 10 | P+ |
| 3 | OA- | 11 | P- |
| 4 | OB+ | 12 | BRAKE |
| 5 | OB- | 13 | N+ |
| 6 | OZ+ | 14 | N- |
| 7 | OZ- | 15 | ALM |
| 8 | SON | 15 |
E-mail: sales06@switek.biz


Свяжитесь с SWITEK IML
sales06@switek.biz
+86 186 5927 5869

DongGuan, GuangDong, China
HuangYanZheng©Copy Right



