
sales06@switek.biz

+86 186 5927 5869

Подпишитесь на нас
sales06@switek.biz
+86 186 5927 5869
Подпишитесь на нас
При заказе роботизированной руки для вашего проекта литья под давлением мы соберем роботизированную руку так, чтобы она могла быть установлена со стороны оператора или без оператора, в зависимости от вашего проекта. Однако иногда вам придется изменить способ установки деталей на другую сторону термопластавтомата. В этой ситуации вам придется выполнить обратную установку роботизированной руки. В этой главе мы рассмотрим 3-осевой сервопривод инжекционного робота с серводвигателем и драйвером Panasonic в качестве примера, чтобы продемонстрировать обратную установку роботизированных рук.
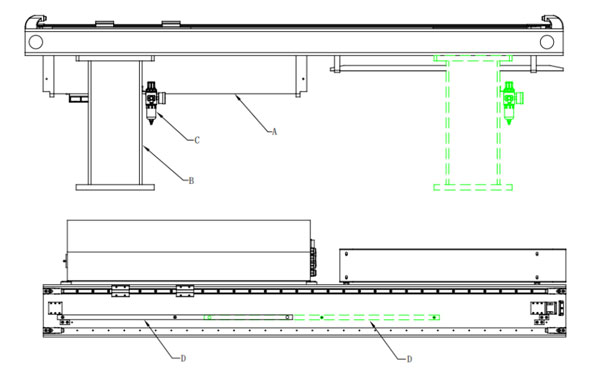
База Обратный
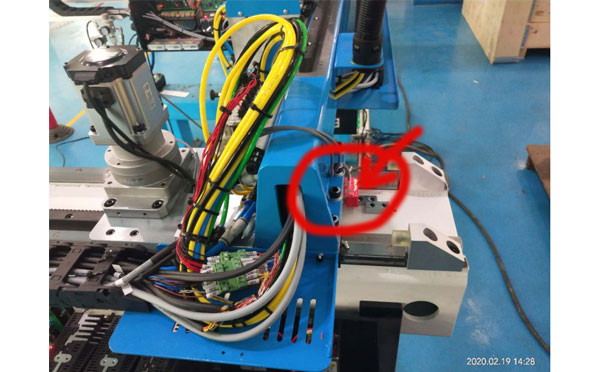
Датчик обратного хода 1
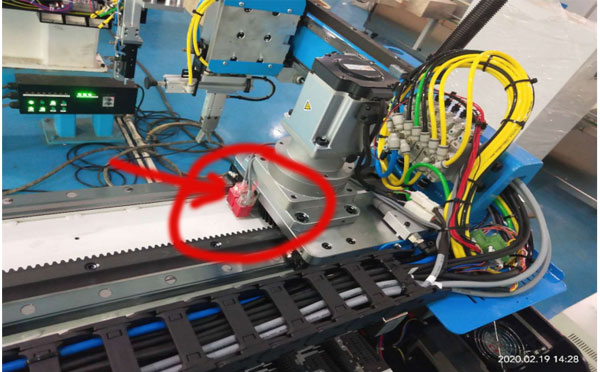
Датчик обратного хода 2
Описание

Настройка параметров Panasonic A6
Процесс модификации:
Нажмите клавишу «S» → затем нажмите клавишу «M» (один раз), найдите Pr0.00 → нажмите клавишу «S» (один раз), если отображаемый параметр равен «1», измените его на «0»; если это «0», измените его на «1» (используйте клавиши «вверх»/«вниз» для изменения параметров). После завершения всех настроек нажмите клавишу «S» на 2 секунды → нажмите клавишу «M» (один раз) → нажмите клавишу «S» (один раз) → нажмите клавишу «ВВЕРХ» (удерживайте 7 секунд, пока на экране не появится «-----»), чтобы сохранить настройки.
Повторите описанный выше процесс для настройки параметров Pr0.12, выключите робота и перезапустите его после завершения настройки всех параметров. Робот будет запущен с новыми настройками.
ВНИМАНИЕ: В целях безопасности вашего объекта, пожалуйста, выполняйте любые изменения параметров в соответствии с инструкциями нашей онлайн-службы поддержки. Наш сервисный инженер проведет вас через весь процесс шаг за шагом.
E-mail: sales06@switek.biz


Свяжитесь с SWITEK IML
sales06@switek.biz
+86 186 5927 5869

DongGuan, GuangDong, China
HuangYanZheng©Copy Right




