
sales06@switek.biz

+86 186 5927 5869

Подпишитесь на нас
sales06@switek.biz
+86 186 5927 5869
Подпишитесь на нас
Ключевые слова:Робот для внутриформовочной маркировки; Работа робота для внутриформовочной маркировки; Робототехника для внутриформовочной маркировки
Настройка механических параметров робота IML включает в себя выбор модульных функциональных блоков, механических параметров осей, сервомоторов и т. д., чтобы обеспечить безопасную и эффективную работу робота IML.
Выбор модели

| Нет. | Имя | Функция |
|---|---|---|
| (1) | Выбор модели | Нажмите здесь, чтобы выбрать название соответствующего режима. |
| (2) | Сохранять | После выбора (1) модели нажмите «Сохранить», чтобы подтвердить операцию. |
| (3) | Отображается информация о выбранной модели. | Эта часть информации отображается для моделей, чтобы помочь вам различать их. (Эту часть информации в модели необходимо сохранять в процессе производства для обеспечения точности.) |
Обратите внимание, что описанная выше операция выбора модели — сохранение после завершения настройки содержимого модели не вступает в силу немедленно. Необходимо инициализировать параметры в разделе «Механические параметры» — сохранение, после чего система перезапускается, и изменения вступят в силу.
Механические параметры

| Нет. | Имя | Функция |
|---|---|---|
| (1) | Инициализировать | При нажатии на него будут считаны исходные данные механических параметров из файла модели, которые затем будут переданы на дисплей в точке (4). |
| (2) | Сохранять | Сохраните существующие изменения |
| (3) | Страница | Параметры прокручиваются вверх и вниз. |
| (4) | Содержание механических параметров |
|
Обратите внимание, что изменения указанных выше параметров вступают в силу не сразу, их необходимо сохранить, и они начнут действовать только после перезагрузки системы.
Параметры привода

| Нет. | Имя | Функция |
|---|---|---|
| (1) | Инициализировать | При нажатии на него будут считаны исходные данные параметров привода из файла модели, которые будут переданы на дисплей в точке (4). |
| (2) | Сохранять | Сохраните существующие изменения. |
| (3) | Страница | Параметры прокручиваются вверх и вниз. |
| (4) | Содержимое параметров привода | Каждый параметр драйвера редактируется и отображается. |
Инструкции по настройке некоторых параметров привода:
| Нет. | Имя | Эффект | Начальное значение | Диапазон | Единица | Главная особенность обстановки | |
|---|---|---|---|---|---|---|---|
| PA1-02 | Выбор системы INC/ABS | Перезагрузить | 0 | 0~1 | «0» — это инкрементальный двигатель, «1» — абсолютный двигатель. | ||
| PA1-04 | Направление вращения | Перезагрузить | 0 | 0~1 | Внесите корректировки, если двигатель вращается в неправильном направлении. | ||
| PA1-13 | режим настройки | В реальном времени | 0 | 0~2 | 0 — автоматический режим, 1 — полуавтоматический, 2 — ручной. При отгрузке робот настроен на режим 1. | ||
| PA1-14 | Соотношение нагрузки к крутящему моменту | В реальном времени | 23.0 | 0.0~300 | Times | ||
| PA1-15 | Усиление настройки | В реальном времени | 7 | 1~40 | |||
| PA1-27 | Предельное значение крутящего момента при движении вперед | В реальном времени | 300 | 0~500 | |||
| PA1-28 | Отрицательное предельное значение крутящего момента | В реальном времени | 300 | 0~500 | |||
| PA1-52 | Настройка S acc/dcc | В реальном времени | 0.0 | 0.0~1000.0 | |||
| PA1-54 | Фиксированное количество ответов на команды позиционирования | В реальном времени | 30.0 | 0.00~250.00 | |||
| PA1-55 | Положение кольца усиления 1 | В реальном времени | 17 | 1~2000 | |||
| PA1-56 | Увеличение скорости кольца 1 | В реальном времени | 5 | 1~2000 | |||
| PA1-58 | Коэффициент усиления обратной связи 1 | В реальном времени | 0.000 | 0.000~1.500 | |||
| PA1-59 | Фильтрация крутящего момента | Перезагрузить | 0.00 | 0.00~20.00 | |||
| PA1-70 | Режим режекторного фильтра | В реальном времени | 1 | 0~1 | Если 0, то для заданного значения допустимо автоматическое определение 1. | ||
| PA1-71 | Номер частоты режекторного фильтра 1 | В реальном времени | 134 | 10~4000 | |||
| PA1-72 | ослабление на первом уровне | В реальном времени | 1 | 0~40 | |||
| PA1-73 | Ширина выемки 1 | В реальном времени | 2 | 0~3 | |||
| PA1-74 | Номер частоты Notch 2 | В реальном времени | 53 | 10~4000 | |||
| PA1-75 | ослабление Notch 2 | В реальном времени | 1 | 0~40 | |||
| PA1-76 | Ширина выемки 2 | В реальном времени | 2 | 0~3 | |||
| PA1-78 | Частота 0 антирезонанса торможения | В реальном времени | 7.0 | 1~300.0 | Hz | Система подавления вибрации эффективна при остановке, поэтому перед настройкой необходимо измерить фактический уровень вибрации. | |
| PA1-79 | коэффициент инерции вибрации тормоза | В реальном времени | 0 | 0~80 | Если значение равно 0, PA1-78 будет недействительным, а если равно 1, PA1-78 будет действительным. | ||
| PA1-80 | Частота 1 антирезонанса торможения | В реальном времени | 8.0 | 1~300.0 | Hz | Система подавления вибрации эффективна при остановке, поэтому перед настройкой необходимо измерить фактический уровень вибрации. | |
| PA1-81 | коэффициент инерции вибрации тормоза | В реальном времени | 0 | 0~80 | Если значение равно 0, PA1-80 недействителен, а если равно 1, PA1-80 действителен. | ||
| PA1-94 | режим фильтра крутящего момента | Перезагрузить | 0 | 0~1 | Установите значение 0 и не используйте фильтрацию крутящего момента. | ||
| PA2-64 | время срабатывания тормоза | В реальном времени | 0 | 0.00~99.9 | Sec | ||
| PA2-65 | Ретроградный отбор устойчивости | Перезагрузить | 1 | 0~1 | Установите значение 1, когда подключен регенеративный резистор, и 0, когда он не подключен. | ||
| PA2-69 | Отклонение от обнаруженного значения | В реальном времени | 15.0 | 0.1~100.1 | Rev | ||
| PA3-79 | Установка значения ретроградного импеданса | Realtime | 30.0 | 3.9~160.0 | Ω | Устанавливается значение регенеративного сопротивления. | |
| PA3-80 | Настройка мощности импеданса для возрождения | В реальном времени | 40 | 1~5000 | W | ретроактивная настройка емкости сопротивления | |
Простой режим настройки

| Нет. | Имя | Функция |
|---|---|---|
| (1) | Выбор оси | Нажмите, чтобы выбрать ось, с которой вы хотите работать. |
| (2) | Автонастройка | При настройке станка перед отправкой с завода параметры привода можно определить в этом режиме. |
| Полуавтоматическая настройка | Полуавтоматический режим настройки: некоторые параметры фиксированы, а некоторые будут доработаны. | |
| Ручная настройка | Все параметры привода фиксированы. | |
| (3) | Установить значение | Используемое в настоящее время соотношение коэффициента усиления к моменту инерции. |
| (4) | Расчетное значение | Значение, полученное в результате текущего расчета. |
| (5) |  | Примените содержимое вычисленного значения к заданному значению. |
| (6) |  | Примените содержимое поля «Установить значение» к полю «Вычисляемое значение». |
| (7) | Сохранять | Измените и сохраните текущие параметры драйвера. |
В автоматическом режиме на этом интерфейсе можно переключать режим настройки каждой оси, изменять коэффициент инерции-крутящего момента и коэффициент усиления настройки, чтобы в режиме реального времени наблюдать за эффектом работы заданных значений и находить более оптимальные параметры.
В режиме автоматической настройки параметр инерционно-крутящего момента PA1-14 измеряется в реальном времени.
Основная функция режима автоматической настройки заключается в автоматической корректировке значения в соответствии с результатами работы, когда подходящие параметры управления неизвестны на начальном этапе отладки, до тех пор, пока результаты работы не станут хорошими и стабильными, и значение отношения инерции к крутящему моменту не будет стремиться к постоянному значению.
Когда работа устройства стабилизируется, переключитесь в полуавтоматический режим настройки, вручную задайте параметры, сохраните их, выключите питание и снова включите устройство, прежде чем параметры вступят в силу. В полуавтоматическом режиме настройки основные параметры, такие как "коэффициент инерции", будут зафиксированы, а некоторые параметры сервопривода будут корректироваться в режиме реального времени для обеспечения плавной работы.
В режиме "Ручная настройка" все параметры сервоприводов фиксируются. Этот режим требует высокой точности в установке параметров.
Простая настройка - Настройка режекторного фильтра

| Нет. | Имя | Функция |
|---|---|---|
| (1) | Выбор оси | Нажмите, чтобы выбрать ось, с которой вы хотите работать. |
| (2) | Адаптивная фильтрация | Функция адаптивной фильтрации: включение/выключение. |
| (3) | Параметры, связанные с режекторной фильтрацией | Различные параметры, связанные с функцией режекторной фильтрации. |
Если в момент включения сервопривода или во время работы возникает резкий звук, можно включить адаптивный фильтр, который автоматически устранит ненормальный звук, вызванный механическим резонансом, и сможет устранить две резонансные точки. При установке резонансной частоты на 4000 резонансных точек нет.
Простая настройка - регулировка вибрации
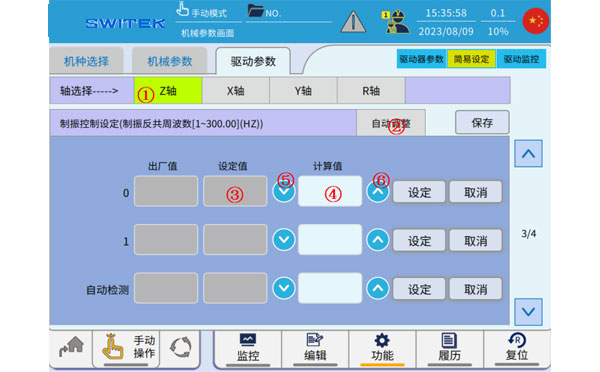
| Нет. | Имя | Функция |
|---|---|---|
| (1) | Выбор оси | Выберите ось, с которой хотите работать. |
| (2) | Автоматическая настройка | Соответствующие параметры системы виброрегулирования определяются автоматически. |
| (3) | Установить значение | Используемые в настоящее время параметры виброгашения. |
| (4) | Расчетное значение | Вычислите полученное числовое значение. |
| (5) | | Примените содержимое вычисленного значения к заданному значению. |
| (6) | | Примените содержимое поля «Установить значение» к полю «Вычисляемое значение».. |
Настройка подавления вибрации: эффективно подавляет вибрацию при остановке, обычно устанавливается значение 5-10. Значение настройки можно приблизительно рассчитать на основе формы волны крутящего момента, но правильно установить его с первого раза сложно.
Простая настройка - обнаружение столкновений

| Нет. | Имя | Функция |
|---|---|---|
| (1) | Выбор оси | Выбор оси для настройки |
| (2) | Изменение максимального крутящего момента |
E-mail: sales06@switek.biz


Свяжитесь с SWITEK IML
sales06@switek.biz
+86 186 5927 5869

DongGuan, GuangDong, China
HuangYanZheng©Copy Right




